
本文报道了一种基于单材料激光诱导石墨(LIG)的应变-温度双峰柔性应变传感器的制备方法。通过应用不同的激光工艺参数并集成到单材料LIG热电偶上,在聚酰亚胺(PI)衬底上感应出具有不同形态和微观结构的LIG电极。当LIG电极弯曲时,所制备的单材料LIG热电偶可以在电极电阻变化的情况下输出由外部温度激励的电动势。采用最佳工艺参数制作的传感器的应变系数可达12.14,塞贝克系数可达2.828 μV·K−1。在应用场景方面,将感应传感器粘贴在蚕丝手套上,实现手势识别和温度感应的应用。
图1(a)给出了基于LIG的新型双模应变-温度传感器的原理图,该传感器包含两个不同微结构和尺寸的LIG电极。该传感器以聚酰亚胺薄膜为碳前驱体和衬底,在外加应变和温度的激励下,LIG电极分别实现了电阻的变化和热电势的输出。该双模柔性传感器的特征是将LIG电极作为敏感结构,其制造过程如图1(b)所示。聚酰亚胺薄膜牢固地粘附在平板上,以确保激光图案化过程中的稳定性。然后用聚焦CO2激光扫描基片,通过在操作系统软件中设置相同的定位点,实现了所创建的两段LIG电极的精确对准。扫描电子显微镜(SEM)图像显示了界面处的形貌,这揭示了LIG电极的两个部分之间的线密度和微观结构的显著差异。图1(c)显示了单材料LIG电极中的塞贝克效应的机理。当在热电偶的两个结之间施加温度梯度时,可以在界面处产生塞贝克电压。先前已经证明,可以通过改变电极的几何形状来实现单材料热电偶的制造。
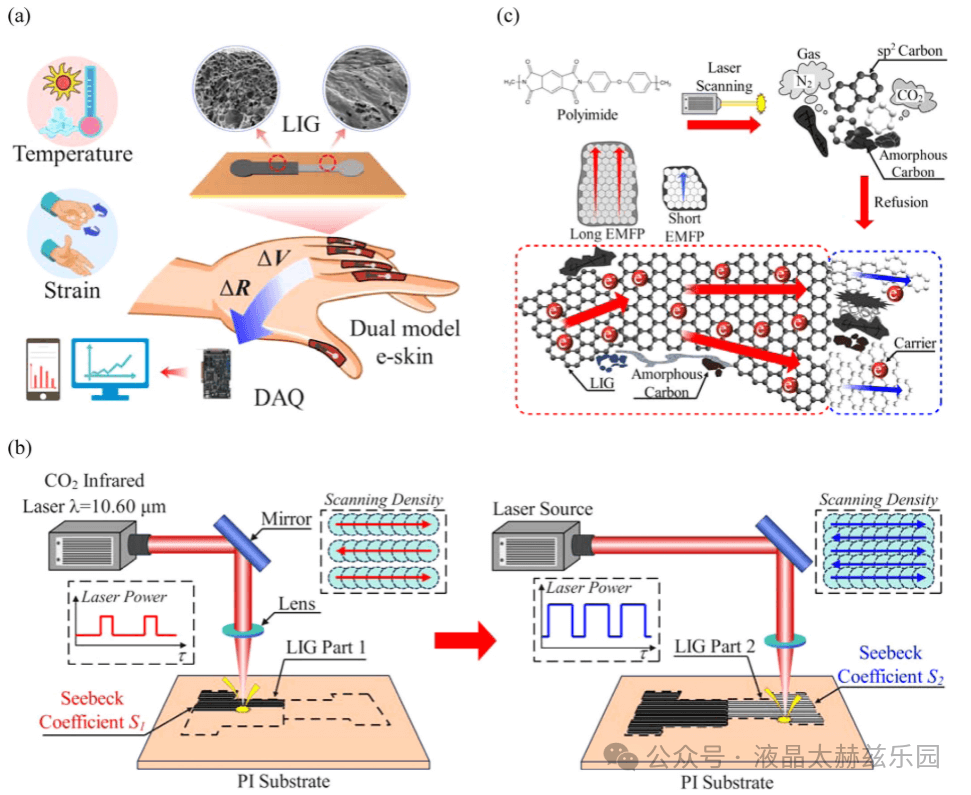
图1.基于激光陀螺的双模应变-温度传感器。(a)用于电子皮肤应用的双模柔性传感器;(b)传感器的制造原理图;(c)用于实现塞贝克效应的单材料LIG热电偶的机理。
激光功率的大小与LIG电极中的碳化程度和石墨烯片中的缺陷密度直接相关。使用532 nm波长激光进行拉曼光谱法。结果如图2(a)所示。从拉曼光谱中,观察到三个突出的峰:在~1350 cm−1处的D峰,由包括面内缺陷和边缘缺陷的缺陷引起,在~1580 cm−1处的G峰由双简并区中心E2 g模引起,在~2700 cm−1处的2D峰由二阶区界声子引起。这些峰共同证明了石墨烯的形成。计算了G带的强度和半高宽,以及ID/IG和I2D/IG的强度比。结果见图2(b)和图2(c)。ID/IG的强度比指示面内缺陷和结构畸变,I2D/IG的强度比表征石墨烯片的堆叠和移动性,并且G带的半峰全宽表示晶体展宽。
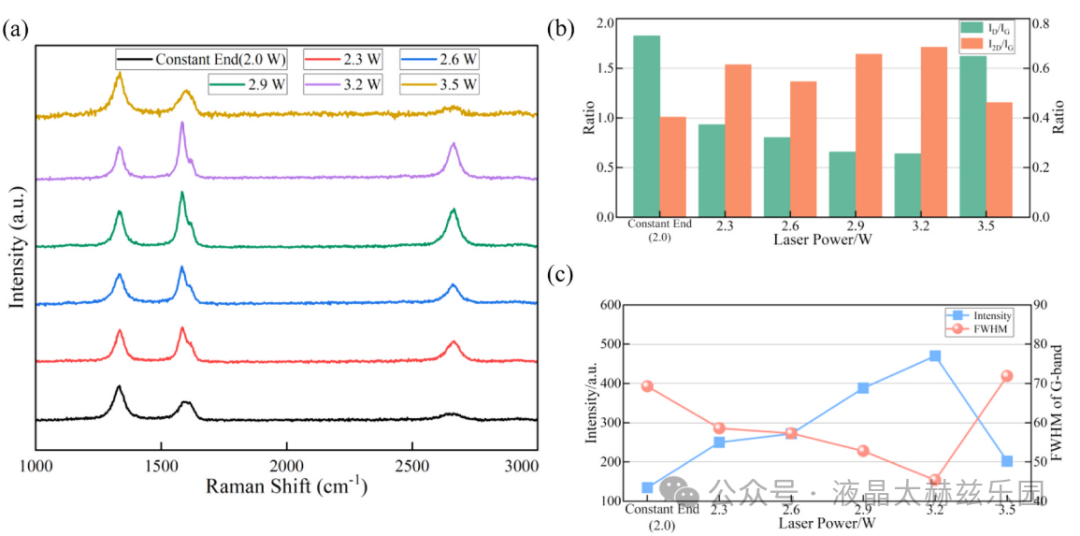
图2.传感器的特性。(a)不同激光功率下的拉曼光谱;(b)不同激光功率下的ID/IG和I2D/IG强度比;(c)不同激光功率下的G带强度和半高宽。
采用试验机测试了该器件的电阻应变效应。图3(a)表明,在正曲率下,传感器的ΔR/R0随着弯曲半径的增加而逐渐增加,分别达到0.45%、0.7%、0.92%、1.0%和1.25%的弯曲应变。计算每个弯曲应变下的量规因子,随后进行线性拟合。该传感器的应变系数达到12.134,线性拟合曲线的R2为0.9923,表明该传感器具有良好的线性。还对传感器的循环稳定性进行了表征,如图3(b)所示。将弯曲应变为0.28%且频率为0.2Hz的弯曲/释放循环施加到传感器,超过1000个循环。图3(c)显示了传感器在不同温度激励下的输出电动势(EMF),可以看出,随着温度从200 ℃线性增加到300 ℃,温度拟合曲线的R2为0.919,表明传感器具有较好的线性度。与目前基于单材料热电偶的双模态传感器的研究相比,本工作显示出一定的优势,如图3(d)所示。
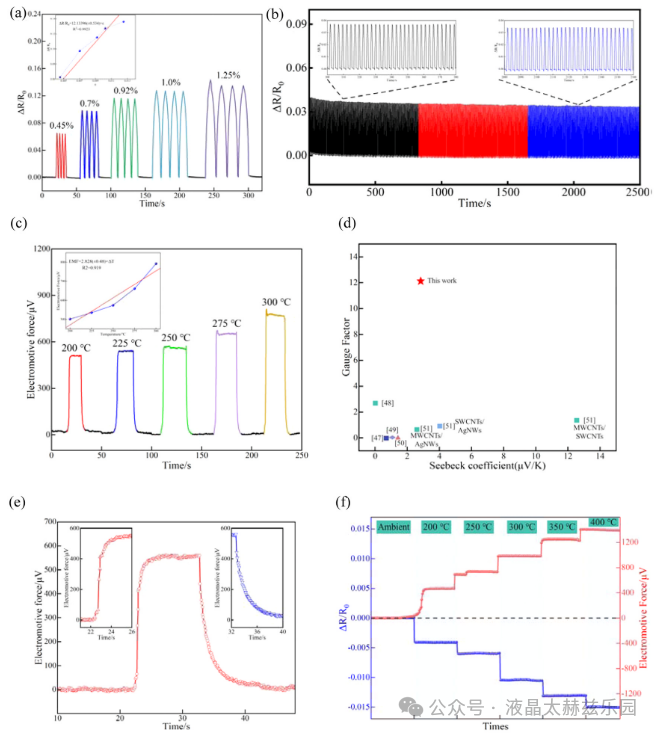
图3.双模态传感器的机械和电热特性的表征。(a)传感器对弯曲应变的响应和灵敏度;(b)传感器循环稳定性示意图,循环次数> 1000;(c)传感器对温度刺激的响应和灵敏度;(d)与以前研制的传感器在塞贝克系数和GF方面的比较;(e)传感器在外部温度刺激下的响应时间;(f)温度升高时传感器的EMF和电阻信号示意图。
在图4中,制作的双模传感器已被粘贴到丝绸手套上的不同位置,以实现手势识别和温度传感应用。例如,如果电阻发生变化(增加或减少),而电压没有显著变化,则可以推断为施加在传感器表面上的弯曲应变刺激。阻力的增大表示正曲率,而阻力的减小表示负曲率。相反,当电压增加而电阻减小时,通常表示环境温度升高。在图4(a)中,五个双模态传感器被附接到丝绸手套的指尖,以使得能够在手指弯曲或抓住物体时进行变形和温度感测。图4(b)已经呈现了传感器在四个不同手势上的电阻和电压信号。当手掌完全展开时,传感器上没有弯曲和热刺激,因此电阻和电位没有变化。当手指弯曲时,LIG电极的轻微变形改变了导电通路,从而导致传感器电阻的波动,而由于缺乏外部热刺激,电位保持恒定。图4(c)示出了抓握装有沸水的烧杯。图4(d)中的相应数据表明,当手指接触烧杯时,电阻减小,电位增加。这些变化归因于弯曲应变和热应力的综合作用。
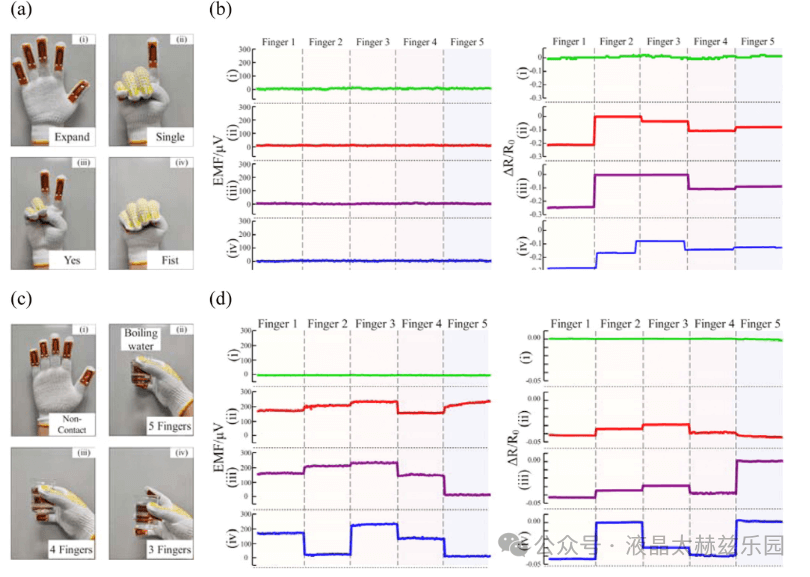
图4.双模态传感器在手势识别和温度传感中的应用。(a)传感器与手势的连接;(b)不同手势下的电位和电阻信号;(c)握住装有沸水的烧杯的示意图;(d)握住烧杯时传感器的电位和电阻信号。
A novel perspective on laser-induced graphene in electronic skin for sensing and distinguishing of strain and temperature
https://doi.org/10.1016/j.sna.2024.116132
本文来自液晶太赫兹乐园,本文观点不代表石墨烯网立场,转载请联系原作者。