
小型机器人系统在医学应用、微操作以及环境修复方面需要能量输入和转换,以实现强大的形状变化或推进。对于需要跳跃、弹射或弹弓的机器人任务,这些设备通常需要在短时间(即短能量释放时间)内释放能量,以产生足够的驱动力。这通常是通过能量放大策略来实现的,在这种策略中,大量的动能是从预先存储的能量(例如弹性能或燃料中的化学能)中产生的。为了实现仿生能量放大,需要开发一种新的能量放大机制。
浙江大学Chengfeng Pan、香港中文大学Li Zhang、美国卡内基梅隆大学Carmel Majidi等人报告了一种工程化的累积应变能-断裂功率放大方法,这种方法受到Ecballium elaterium(喷射黄瓜植株)的加压流体喷射机制的启发。本文实现了一种光驱动的水凝胶发射器,它利用嵌入石墨烯悬浮液的光热响应触发的快速液体汽化。这种汽化导致周围水凝胶网络内可观的弹性能量存储,随后在0.3毫秒内迅速释放弹性能量。这些软性水凝胶机器人实现了高速可控发射,并具有可预测的轨迹。累积应变能-断裂方法被用来创建一个人工喷射黄瓜,它可以将人造种子分散到数米之外,通过集成的射频识别芯片进一步实现智能播种。这种能量放大策略为推进运动提供了基础,以提升微型软体机器人系统的能力。
相关研究成果以“Fracture-driven power amplification in a hydrogel launcher”为题发表于《Nature Materials》。
弹道传播是植物中一种独特的方法,涉及通过果实的爆炸性裂开将种子喷射到长距离。例如,在喷射黄瓜的生长过程中(图1a),果肉会变成粘液状液体团,果壁会被拉伸(应变能积累)(图1b(ii))。当达到临界压力时发生断裂(能量释放),使得种子能够以高速度和加速度发射出去(图1b(iii))。
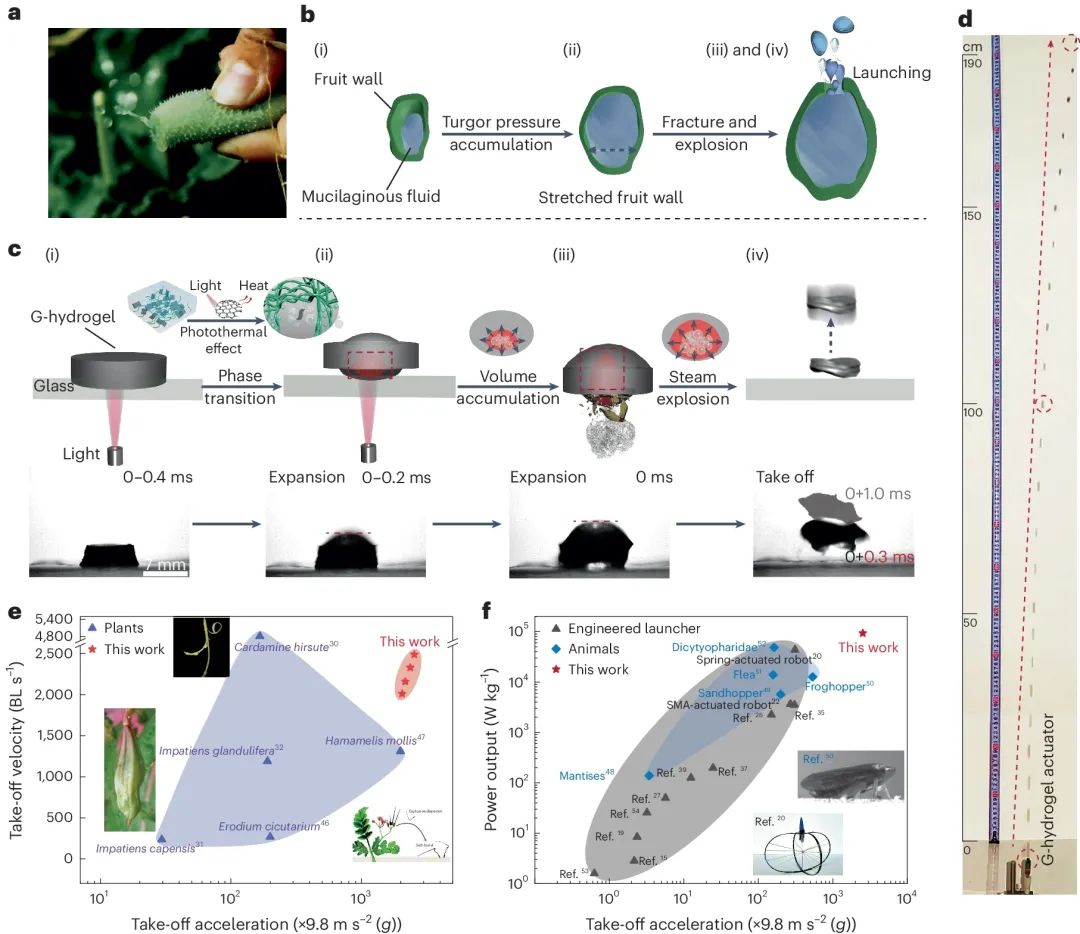

图1. 基于ASEF的能量放大
受这种能量放大方法的启发,本文开发了一种工程化的ASEF能量放大方法版本,并通过一个软水凝胶发射器来演示,该发射器由嵌入共聚物水凝胶中的石墨烯组成(称为G-水凝胶)(图1c)。ASEF能量放大是通过嵌入石墨烯片的光热响应在高能光照下启用的。光照引起复合体在辐照区域内快速加热,这是由于光热效应(在2秒内从20.3加热到136.5℃)。这反过来又引起水凝胶内的水从液态转变为蒸汽(图1c)。驱动过程如图1c所示,其关键阶段的快照由高速摄像机记录(图1c)。连续的光照射引起水的汽化,由于累积的蒸汽压力导致水凝胶基质快速连续膨胀(图1c(ii),(iii)),这与喷射黄瓜生长过程中果壁的变形相对应(图1b(ii),(iii))。
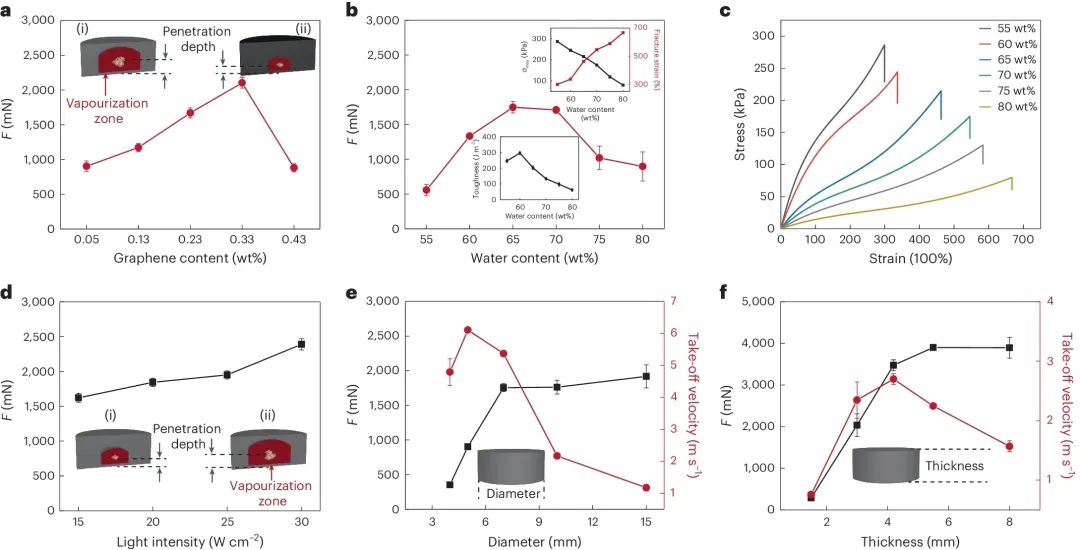
图2. 影响G-水凝胶发射器驱动力的因素
本文研究了影响G-水凝胶发射器驱动力的因素,包括成分(石墨烯和水分含量)、光能输入(光强度)和几何设计(发射器尺寸)。驱动力通过G-水凝胶发射器的垂直运动来表征。石墨烯的加入作为光热剂,控制着近红外激光刺激下热量的转化。石墨烯浓度影响水凝胶内部的水汽化,进而控制G-水凝胶发射器的力输出。如图2a所示,随着嵌入的石墨烯含量从0.05增加到0.33wt%,由于更高的石墨烯浓度使得热能输入更大,从而增加了蒸汽膨胀和汽化区的强度,驱动力随之增加(图2a(i))。然而,过多的石墨烯含量(0.43wt%)会导致驱动力减少,因为石墨烯会阻挡近红外光并降低其穿透深度。在这些情况下,本文观察到汽化发生在G-水凝胶发射器底部表面非常靠近的地方。汽化的浅层深度导致水凝胶更快地断裂,这减少了储存的弹性能量,从而导致驱动力减少(图2a(ii))。使用力传感器进行的直接力测量结果与关于发射高度的计算结果趋势相似,且偏差有限。基于此分析,我们发现需要仔细选择光热剂的浓度,以平衡光热能量转换效率和近红外穿透深度之间的权衡。
机械分析表明:结合了大极限强度、高断裂应变和适当韧性的水凝胶材料展现出更强的推进运动。这是因为这样的材料允许储存更大的弹性能量(U),这与G-水凝胶发射器的最大变形(w)和弯曲刚度(D)正相关。在这项工作中,通过调整水分含量来定制G-水凝胶的机械性能,因为少量的石墨烯含量影响有限。图2b(插图)和代表性的应力-应变曲线(图2c)显示,较高的水分含量导致G-水凝胶具有较小的极限强度和较大的断裂应变,以及影响弹性能量储存。尽管汽化区的水凝胶材料性质与原始水凝胶不同,但由于汽化区体积小,整体驱动过程的描述以及弹性能量的估算不会受到明显影响。这些机械性能的权衡导致输出驱动力随水分含量增加而先增加后减少。特别是,本文发现在水分浓度约为65wt%时,力量达到峰值(图2b)。
应该注意的是,图2b中显示的结果只能用于揭示G-水凝胶材料的机械性能与不同水分含量下G-水凝胶发射器的力输出之间的关系,因为这些测量是在准静态应变率(0.05 s−1)和室温下进行的,这与G-水凝胶材料在驱动期间的操作条件(超快应变率,>1,000 s−1和高达100℃的高温)有很大差异。本文还研究了G-水凝胶材料在极端条件下的机械行为,并发现了衰减的机械性能,如降低的断裂强度和应变。
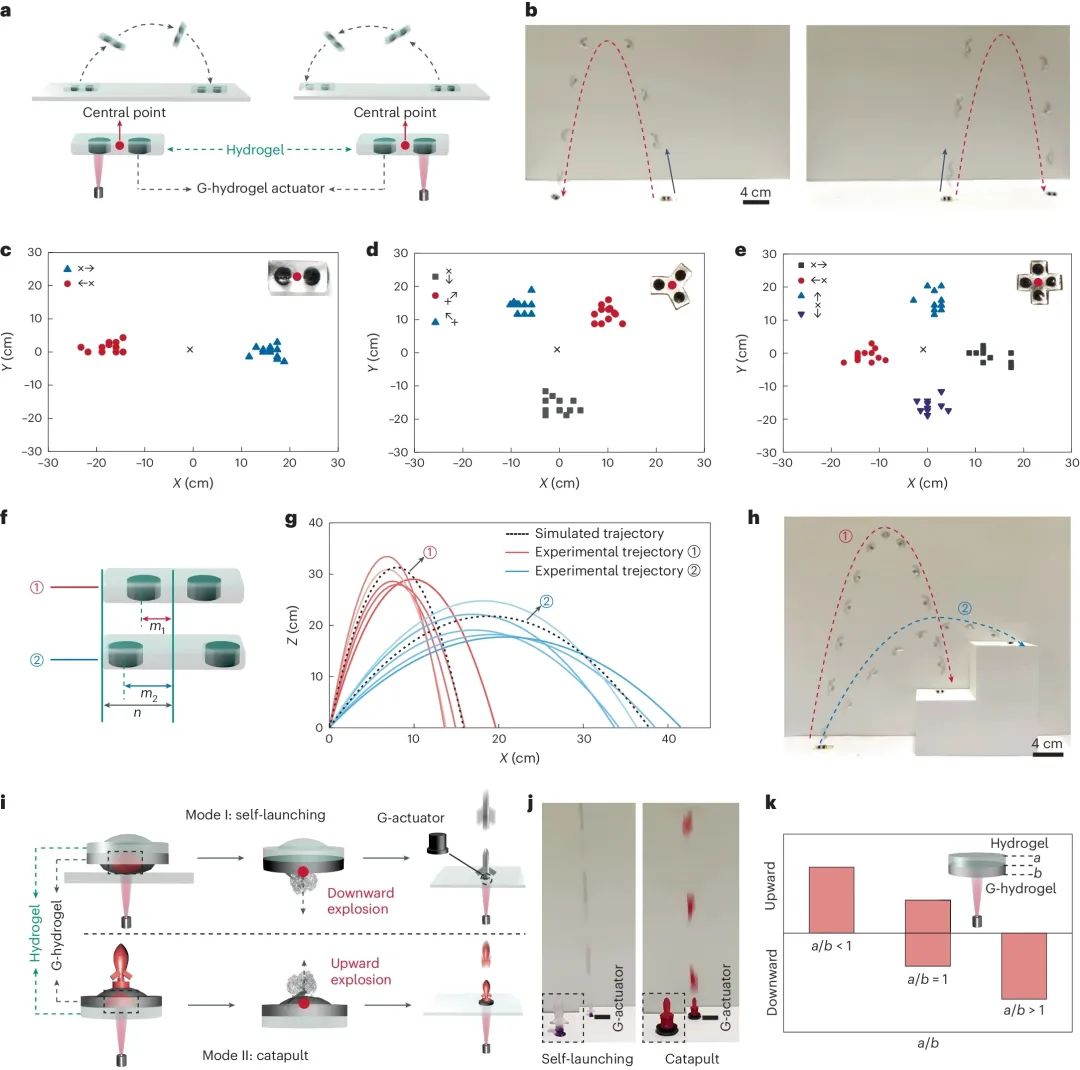
图3. 水凝胶机器人的结构设计及发射轨迹控制
除了垂直发射外,基于ASEF的G-水凝胶发射器还可用于开发能够按预定轨迹运动并将运输到指定位置的水凝胶基软机器人。如图3a所示,两个G-水凝胶发射器嵌入在一个原始水凝胶块中。基于该原理可设计一种软水凝胶机器人,它可以根据刺激哪个发射器朝两个不同方向发射(图3b)。本文为每个方向发射了12个机器人,并记录了它们的着陆位置(图3c)。结果显示一致的着陆位置,表明能够控制跳跃运动。这种策略可以扩展到多方向机器人,如图3d,e(插图)分别展示的带有三个和四个G-水凝胶发射器的水凝胶机器人。记录的相应着陆位置(图3d,e)进一步展示了在不同方向上的受控跳跃。
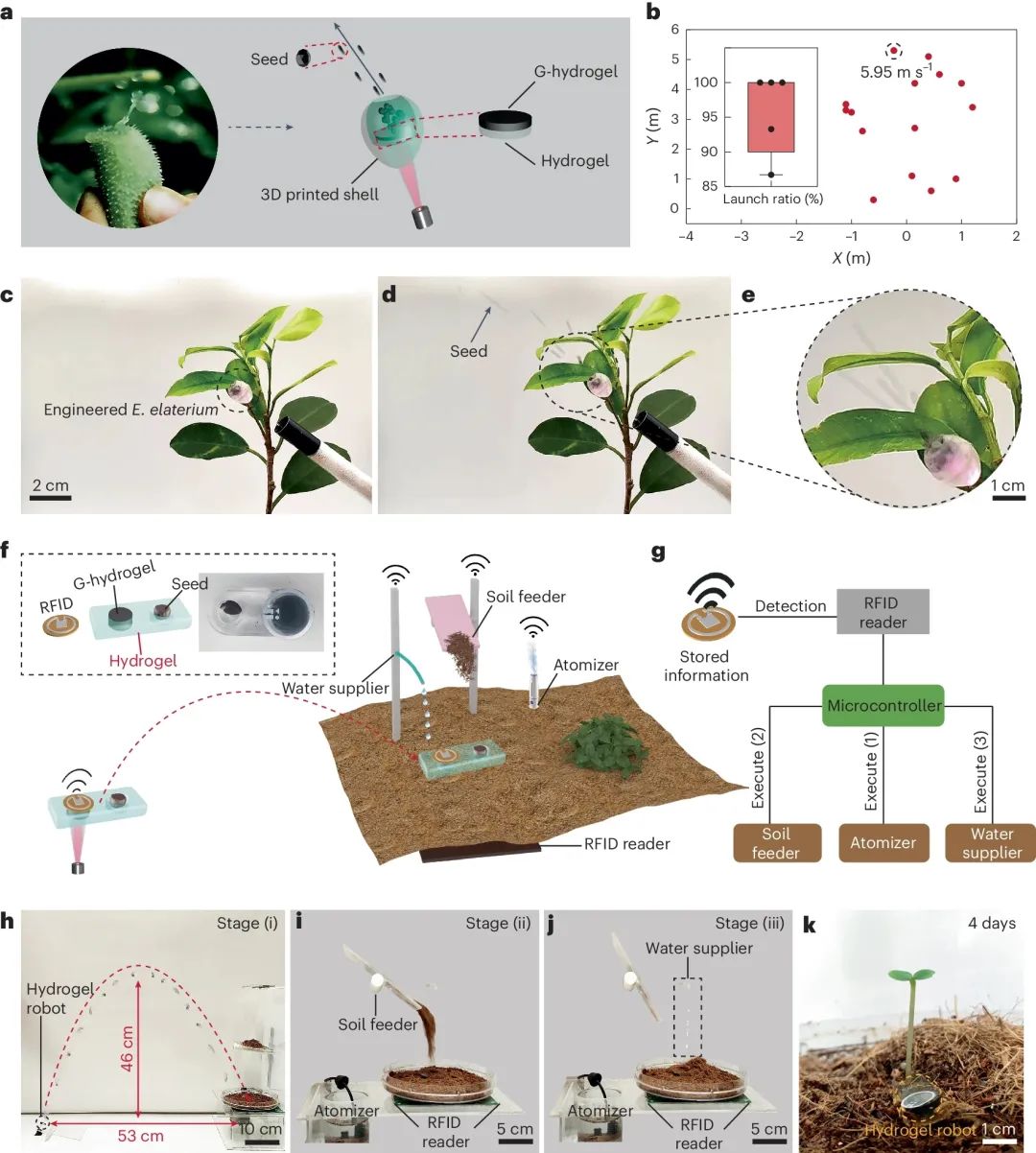
图4. E. elaterium 启发的种子传播与智能种子机器人
为了展示这种基于ASEF的G-水凝胶发射器在机器人应用中的潜力,本文首先构建了一个工程化的Ecballium elaterium版本来模仿种子传播过程(图4a)。如图4a中的示意图所示,G-水凝胶发射器被制造并组装在一个3D打印的半透明树脂壳内,该壳体被放置在植物的枝条上。然后,将15颗黑色玻璃珠插入G-水凝胶发射器的顶部以模仿种子。这种人造的E. elaterium通过近红外刺激高速喷射玻璃珠。记录这些玻璃珠的着陆位置以分析工程化E. elaterium的驱动性能。
正如图4b所示,本文展示了五次驱动实验中超过96%的珠子发射成功率。代表性的着陆位置统计显示最大发射位移为5.3米,对应的起飞速度为5.95米/秒。这种仿生高速种子传播表明,G-水凝胶发射器可以匹配自然动力放大机制的力量和加速度(图4c-e)。此外,短时间暴露于高温蒸汽不会影响真实种子的发芽率。这种受生物启发的种子处理装置可以通过在种子和G-水凝胶发射器之间添加一个热隔离板来进一步改进,以避免高温蒸汽的影响,同时不影响投射性能。
总结与展望
本文开发了一种光驱动的能量放大方法,它利用了共聚水凝胶网络的弹性与嵌入石墨烯的光热响应引起的水蒸汽化之间的协同相互作用。这种软水凝胶发射器能够进行ASEF推进,具有可控的弹射和自发射运动行为,其特点是具有异常高的起飞加速度(2.5 × 104 m s–2;>2,500g)、发射高度(643 BL,>1.93 m)和超短能量释放时间(0.3 ms)。材料结构设计的关键原理是选择一种结合高韧性、高弹性并与光敏填料掺杂以实现快速汽化转变的基质。除了所选的G-水凝胶材料系统外,本文还列出了材料选择的潜在候选者。本研究团队预见这些材料设计原则将提供对能量放大机制的进一步见解,并激发在需要快速运动、跳跃或在规定距离上发射物体的领域中的新设计。
原文链接:http://www.nature.com/articles/s41563-024-01955-4
本文来自Carbontech,本文观点不代表石墨烯网立场,转载请联系原作者。