
癌症仍然是现代医学需要应对的一个严峻挑战,每年影响着数百万人的生命。随着临床试验和研究的不断发展,创新的方法对于克服癌症治疗中持续存在的挑战至关重要。微机器人是设计用来在人体内执行复杂任务的微型机器。这些微型机器已经引起了人们的极大关注,因为它们有可能彻底改变医疗程序,特别是在精确提供癌症治疗方面。然而,确保它们的可靠性和可控性仍然是一个关键的障碍。制造微机器人的传统方法已经取得了一些成功,例如光刻、掠角沉积、生物模板、激光烧蚀和基于折纸的自滚动。然而,这些技术经常受到低产量和材料密度问题的困扰,这可能会阻碍微型机器人的运动和精度。是否能够设计一种微机器人,既能保证生产的高效,又能实现运动的高速、高精度呢?
近日,广东工业大学陈新/陈云教授团队联合香港中文大学赵铌教授团队创造性的提出了一种非常规的激光诱导石墨烯(LIG)工艺,使高通量制造具有高速运动和几乎无漂移定向能力的微型机器人成为可能。在前期激光诱导加工石墨烯及其器件的工作基础上(Small Methods, 2019(3): 1900208; Advanced Materials, 2021, 33, 2104290; Advanced Materials, 2022, 34: 202200517等),研究团队在激光诱导聚合物到石墨烯的转换过程中引入非对称畸变,从而加工出形状可控的螺旋状石墨烯片;基于此进一步开发出运动速度快、运动路径精准且无偏移的轻质磁驱动微机器人,实现了每秒2.64体长的高游泳速度(前进速度为3109μm/s)。得益于激光加工的高效,该制造方法实现了高效加工(每秒77个微型机器人支架)。最后,通过活体实验展示了轻质磁驱动微机器人在载药靶向治疗方面的能力。该石墨烯基轻质磁驱微机器人显示出了其在高通量和大规模生产方面的潜力,同时也为高效加工高性能微机器人提供新的思路。
该研究以题为“Lightweight and drift-free magnetically actuated millirobots via asymmetric laser-induced graphene”的论文发表在最新一期《Nature Communications》上。广东工业大学机电工程学院陈云教授为论文第一作者,博士生郭媛慧、谢斌等深度参与完成了相关的研究工作。广东工业大学生物医药学院卢宇靖教授团队在微机器人活体实验方面提供了支持。论文通讯作者为陈新教授、卢宇靖教授和香港中文大学的赵铌教授,研究工作依托省部共建精密电子制造技术与装备国家重点实验室,广东工业大学为论文第一单位及第一通讯作者单位。
首先,我们创新性的在激光诱导聚合物到石墨烯的转换过程中引入非对称畸变,利用光束整形和离焦来产生三角形的激光光斑,从而产生强度不对称的光斑形状。这种不对称形状引起了聚合物-石墨烯转换过程中不均匀的气体产生,导致石墨烯片从基板剥离时扭曲成螺旋结构。这种微型机器人支架结合了LIG的低密度和高表面疏水性,对于在液体环境中高效移动和最小化漂移至关重要。
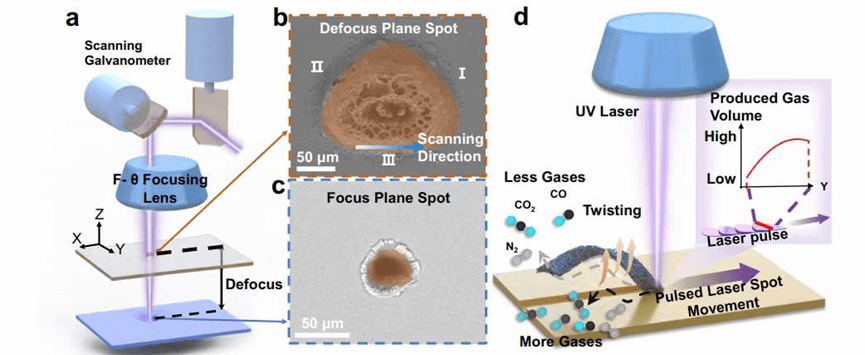

多孔螺旋石墨烯片的设计和加工工艺。
随后,通过在这些石墨烯基支架上沉积一层镍,我们利用磁驱动来实现卓越的运动速度和精确的轨迹跟踪。这些微型机器人展现出与它们的预定路径几乎为零的偏差,这是对现有模型的重大改进。
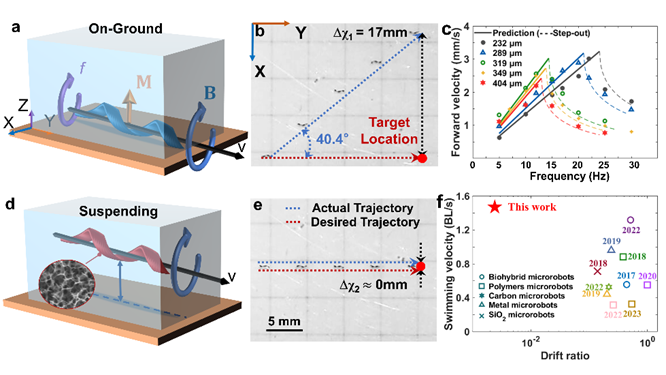
具有不同悬浮状态和特征的石墨烯螺旋微型机器人示意图。
此外,石墨烯基微机器人能够通过π-π堆叠、静电和疏水等相互作用作用结合抗癌药物。通过近红外照射,能够在保证深层组织渗透和最小的器官损伤的情况下可控释放药物。研究结果表明,该微机器人在长距离运动和生理环境中的靶向药物递送方面表现出色。这项研究突出了石墨烯螺旋微机器人技术的潜力,能够满足癌症治疗的严格要求,提供卓越的性能,多功能性,可扩展性和成本效益。
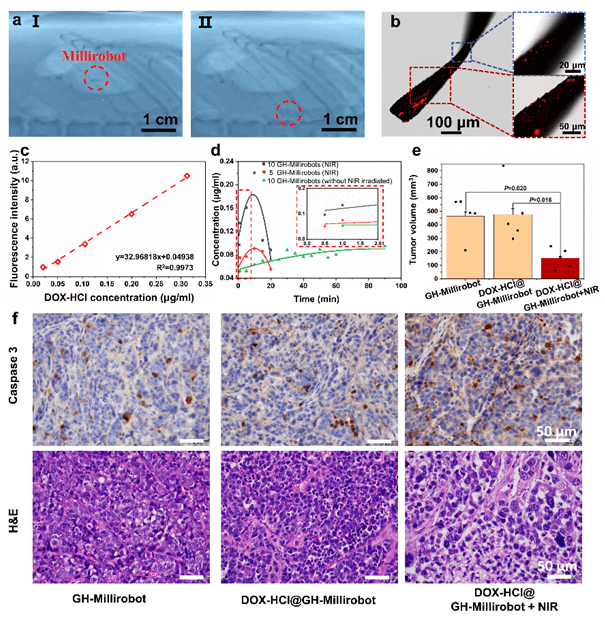
GH微型机器人的药物输送、释放及其治疗。
这种高通量能力是将微型机器人广泛应用于临床环境的关键一步,使我们更接近一个癌症治疗更加精确、有效和易于实现的未来。
原文链接:https://www.nature.com/articles/s41467-024-48751-x
本文来自高分子科学前沿,本文观点不代表石墨烯网立场,转载请联系原作者。