
成果简介
大变形时的高柔性和超弹性气凝胶已成为实际应用中迫切的力学需求,但这两种特性通常是相互排斥的。本文,浙江大学 刘英军、彭玉鑫 、许震、高超课题组在《Small》期刊发表名为“Highly Flexible and Superelastic Graphene Nanofibrous Aerogels for Intelligent Sign Language”的论文,研究提出了一种石墨烯纳米纤维气凝胶(GNFAs)的跨尺度多孔性设计,以打破高柔性和超弹性之间的权衡。由此产生的GNFAs在60%的折叠应变下经过1000次疲劳循环后可以完全恢复,并且在90%的压缩应变下经过10000次循环后仍能保持出色的结构完整性,优于大多数已报道的气凝胶。
这种机械稳健性源于其跨尺度多孔结构,该结构由双曲微孔和多孔纳米纤维组成,具有较大的弹性变形能力。研究进一步揭示了柔性和超弹性GNFA 作为电传感器在检测拉伸和弯曲变形方面表现出的高灵敏度和超稳定性。将GNFA 传感器安装到人的手指上,并通过多层人工神经网络实现了高精度的手语智能识别,就是最好的证明。这项研究提出了一种高柔性、高弹性的石墨烯气凝胶,可用于传感器技术中的可穿戴人机界面。
图文导读
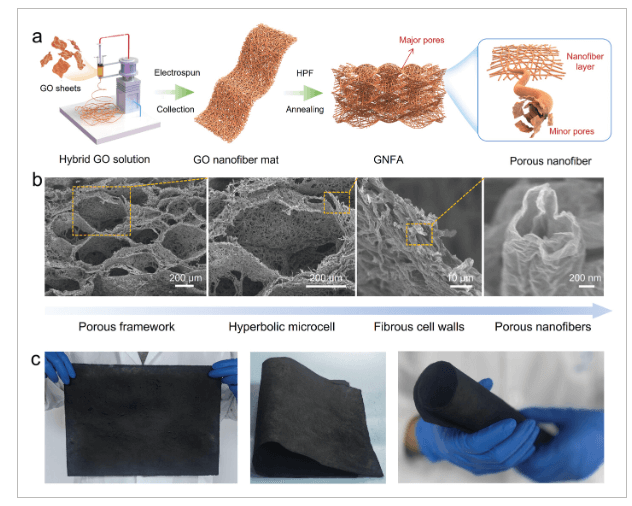

图1、a) GNFA制备示意图。b) 通过SEM图像对GNFA进行跨尺度结构。c) 具有折叠和弯曲变形的大型样品的数码照片。
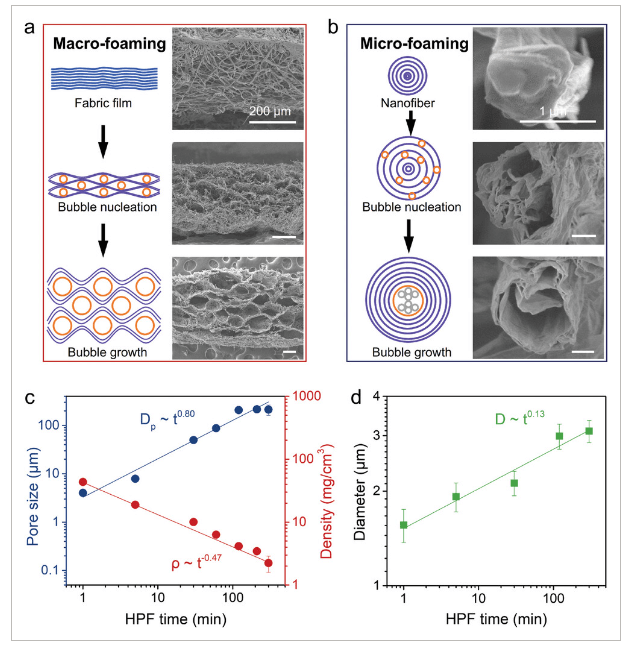
图2、a) 纳米纤维层之间宏观发泡的图示和结构演变。b) 纤维之间微发泡的图示和结构演变。c) HPF时间对GNFA孔径和密度的影响。(c) HPF时间与纳米纤维直径之间的关系。
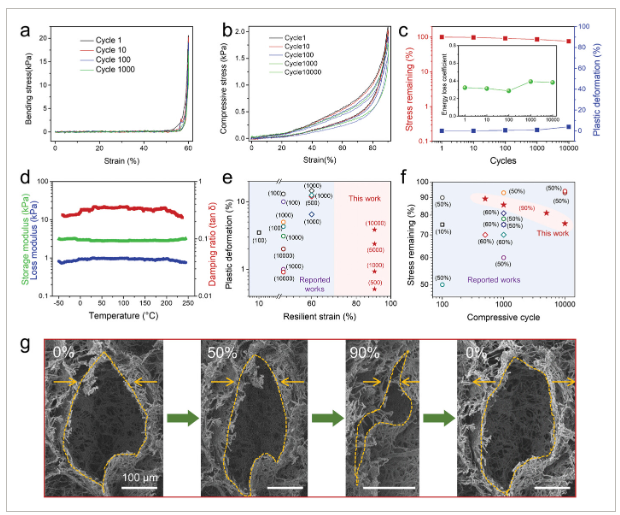
图3、GNFA的机械性能
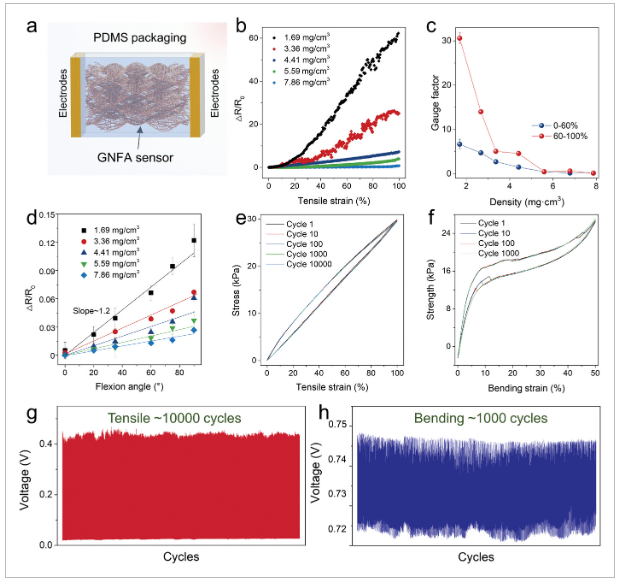
图4、a) 柔性GNFA传感器的结构图。b) 电阻变化比(△R/R0)的GNFA传感器,具有不同的密度到100%的拉伸应变。c) 不同密度的GNFA传感器的标距系数。d) △R/R0具有不同密度的GNFA传感器,弯曲角度为90°。GNFA传感器在疲劳试验期间的机械e)拉伸(1000次循环)和f)弯曲(10000次循环)性能。GNFA传感器的抗疲劳性高达g)100%的拉伸应变(10 000次循环)和h)50%的弯曲应变(1000次循环)。
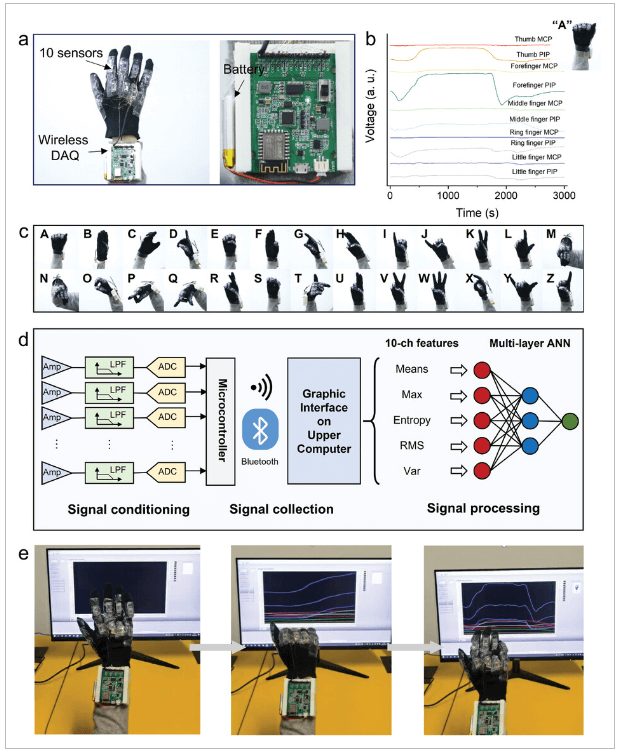
图5、a) 一只带有10个GNFA传感器和无线DAQ的人手(左)。用于收集电信号的DAQ的结构(右)。b) 在制作“A”的手语时收集了10个通道传感器的信号。c) 从A到Z的26个手语字母。d)手语人机交互流程图,包括信号调节、收集和处理。e) 在测试过程中用数码照片识别“A”的手语。
小结
本文提出了一种跨尺度多孔设计,通过电纺法和水塑发泡法相结合,制备出了高柔性和超弹性的石墨烯纳米纤维气凝胶。带有多孔石墨烯纳米纤维的双曲微胞在大变形时具有高弹性恢复能力,即使在 90% 的压缩应变和 10 000 次疲劳循环条件下,跨尺度气凝胶仍具有良好的结构稳定性。石墨烯纳米纤维气凝胶优异的机械性能有助于制造超稳定、可靠的高灵敏度电传感器。此外,通过与人工神经网络的集成,实现了手语的精确人机交互,可实时快速识别 26 个字母。大大增强的机械弹性提高了柔性纳米纤维气凝胶在智能电子、隔热、催化和吸声等领域广泛工程应用的实用价值。
文献:https://doi.org/10.1002/smll.202400415
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。