
成果简介
多功能执行系统涉及多个执行和传感器装置与外部能源的机械集成。这种复杂的组合很难满足轻量化的要求。本文,福建理工大学翁明岑 副教授团队,北京理工大学沈国震 教授、闽江学院Huamin Chen等研究人员在《ADVANCED SCIENCE》期刊发表名为“Multi-Functional Actuators Made with Biomass-Based Graphene-Polymer Films for Intelligent Gesture Recognition and Multi-Mode Self-Powered Sensing”的论文,研究提出提出了聚吡咯@石墨烯-细菌纤维素(PPy@G-BC)薄膜,以构建集成了多模式自供电传感功能的多响应双层致动器。PPy@G-BC 薄膜不仅具有良好的光热电(PTE)特性,还具有良好的亲水性和较高的杨氏模量。因此,PPy@G-BC 薄膜可用作集成了自供电传感功能的多反应双层致动器的活性层。
本文设计了两种集成自供电传感功能的多功能致动器。一种是光驱动致动器,通过 PTE 效应实现自供电温度传感功能。在机器学习算法的辅助下,自供电仿生手可以实现智能手势识别,准确率高达 96.8%。另一种是集成了锌空气电池的湿度驱动执行器,可实现自供电湿度传感。基于上述优势,这两个多功能致动器被巧妙地集成到了一个设备中,在抓取物体的同时,还能实现自供电的温度/湿度感应。这种高度集成的设计既能有效利用环境能源,又能在不增加系统复杂性的情况下对多种物理特性进行互补协同监测。
图文导读
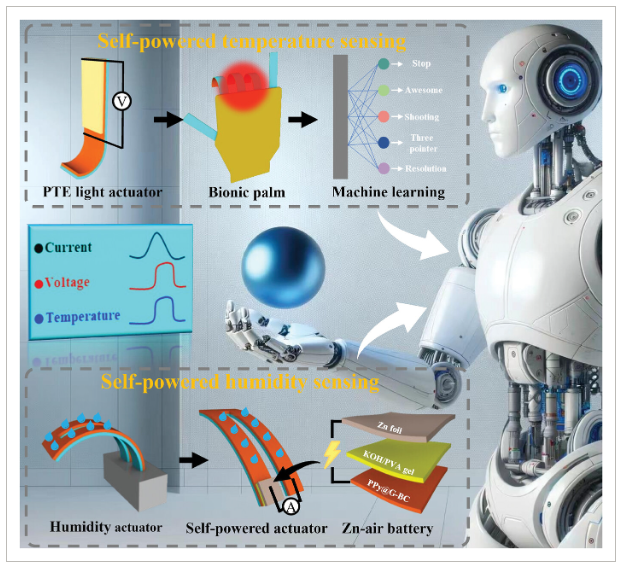

方案一、基于多响应式 PPy@G-BC/BOPP 执行器的智能夹持器,集成了自供电和多模式传感功能。背景图片由 Midjourney 设计。
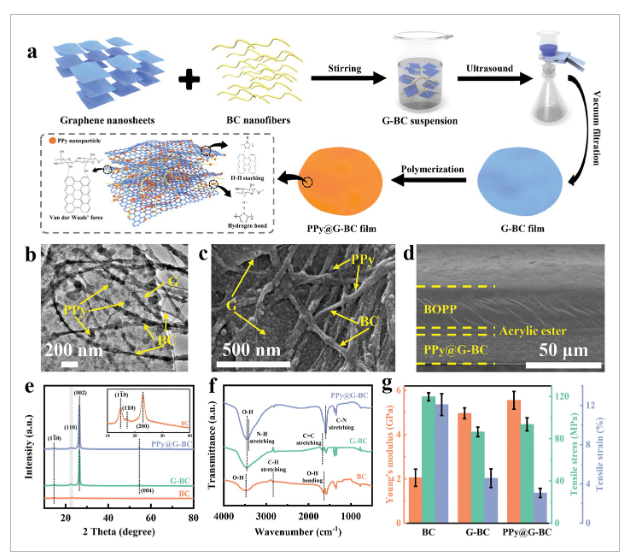
图1、PPy@G-BC薄膜的制造和表征
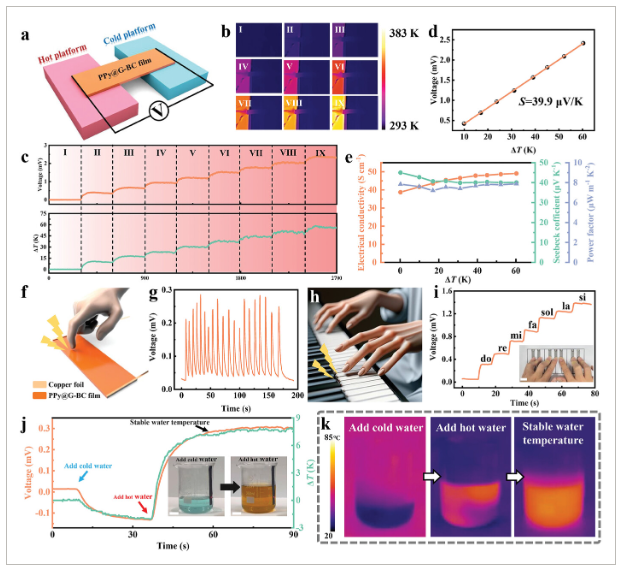
图2、PPy@G-BC薄膜的TE特性
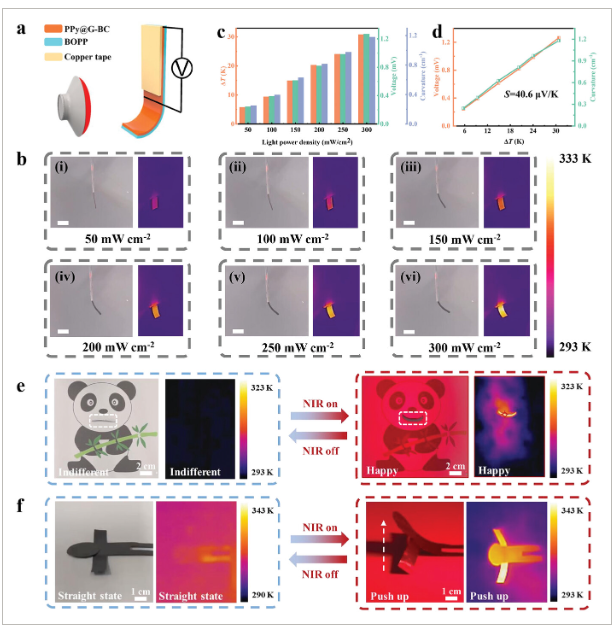
图3、PPy@G-BC/BOPP 执行器的光驱动驱动和自供电传感性能
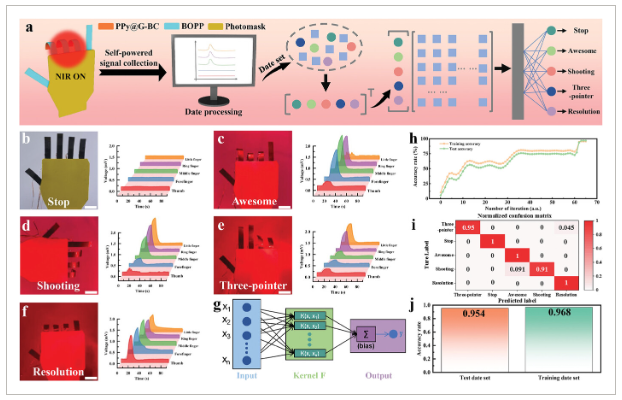
图4、用于智能手势识别的自供电仿生手
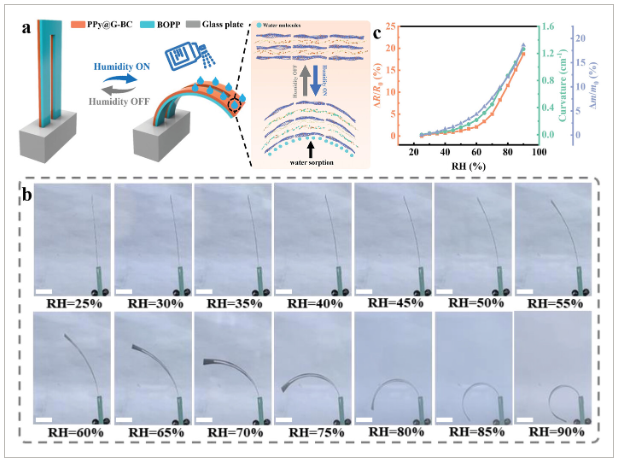
图5、PPy@G-BC/BOPP执行器的湿度驱动和湿度敏感特性
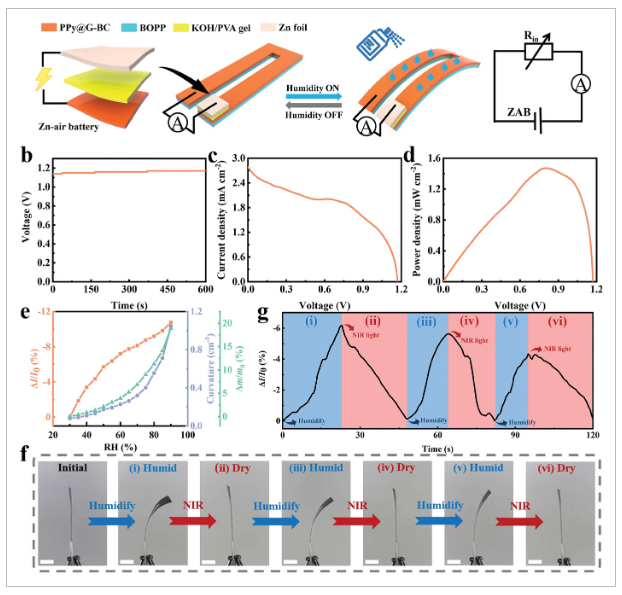
图6、PPy@G-BC/BOPP执行器的湿度驱动和自供电湿度传感
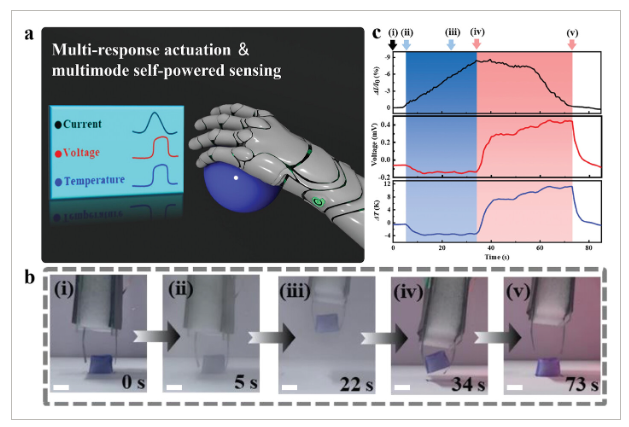
图7、具有自供电多模式传感功能的智能抓手
小结
综上所述,采用真空过滤和原位聚合相结合的低成本方法,容易制备了具有多层网络结构的独立式PPy@G-BC薄膜。石墨烯、BC和PPy之间强烈的物理和化学交联使PPy@G-BC薄膜具有优异的拉伸强度(93.53 MPa)和杨氏模量(5.55 GPa),这是驱动变形的重要基础。此外,PPy@G-BC薄膜作为光热层具有良好的PTE性能(塞贝克系数为42.8 μV K−1)和良好的亲水性,作为湿敏层(WAC为37.9°)。基于PPy@G-BC薄膜的这些优异综合性能,开发了两种具有自供电和多模式传感功能的执行器。一种是光驱动的PPy@G-BC/BOPP执行器,它基于不对称的热膨胀效应而变形。PPy@G-BC/BOPP执行器可以自发产生热电电压,从而实时反映其自身的变形状态和温度变化。
基于这种光驱动致动器设计了一种自供电仿生手,可以执行各种复杂的手势。在SVM算法的辅助下,可以准确识别这只仿生手做出的各种手势,准确率高达96.8%。另一种是湿度驱动的PPy@G-BC/BOPP执行器,该执行器基于不对称的湿度膨胀效应而变形。PPy@G-BC/BOPP执行器通过原位集成柔性锌空气电池,实现对自身变形状态和湿度的自供电监测。上述两种执行器的致动变形和自供电传感功能一致性好,互不干扰。最后,在这两个执行器的互补协同作用下,智能抓手不仅可以在光和湿度的双重刺激下移动物体,还可以实现多模式(温度/湿度)传感功能。在单个设备中同时实现多响应驱动和自供电传感的巧妙策略将推动柔性电子、软体机器人、人机交互和环境监测领域的发展。
文献:https://doi.org/10.1002/advs.202309846
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。