
成果简介
监测触觉压力和识别动作是人造电子皮肤(e-skin)的重要功能。此外,为了为 3D 对象创建贴合的覆盖物,电子皮肤需要可拉伸,同时又不牺牲对触觉压力的敏感性。然而,传感器的拉伸通常会影响其输出稳定性。本文,北海道大学Kuniharu Takei等研究人员在《ADVANCED FUNCTIONAL MATERIALS》期刊发表名为“Stretchable Electronic Skin using Laser-Induced Graphene and Liquid Metal with an Action Recognition System Powered by Machine Learning”的论文,研究使用激光诱导石墨烯和液态金属合金GaInSn在弹性ecoflex聚合物中开发了一种可拉伸的电子皮肤,以创建可拉伸的电阻式触觉压力传感器。此外,压力传感器阵列被制造成电子皮肤,并使用机器学习对输出进行信号处理。通过该系统,电子皮肤还可以监测其拉伸状态,因此无论拉伸程度如何,都可以计算触觉压力。借助机器学习辅助的电子皮肤,可以成功地以人体皮肤的方式识别拍打、滑动和抓取等动作。
图文导读
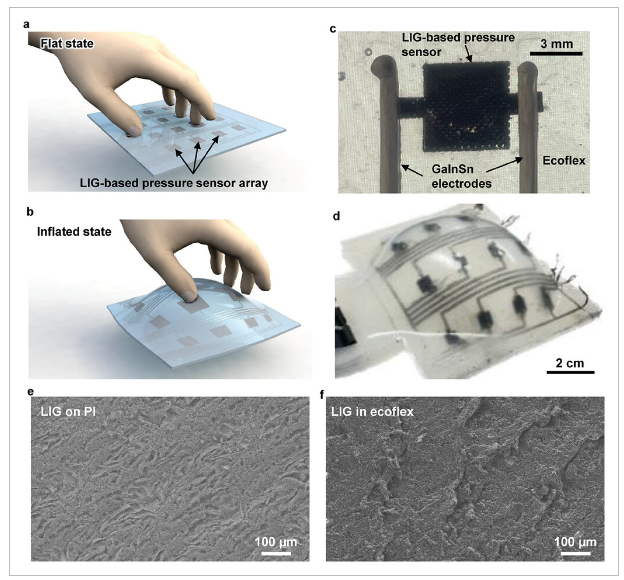

图1、充气电子皮肤的示意图
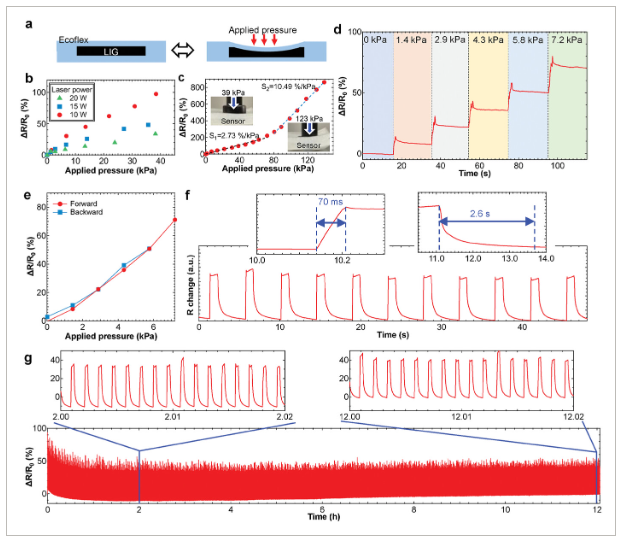
图2、无充气压力传感器的电气特性
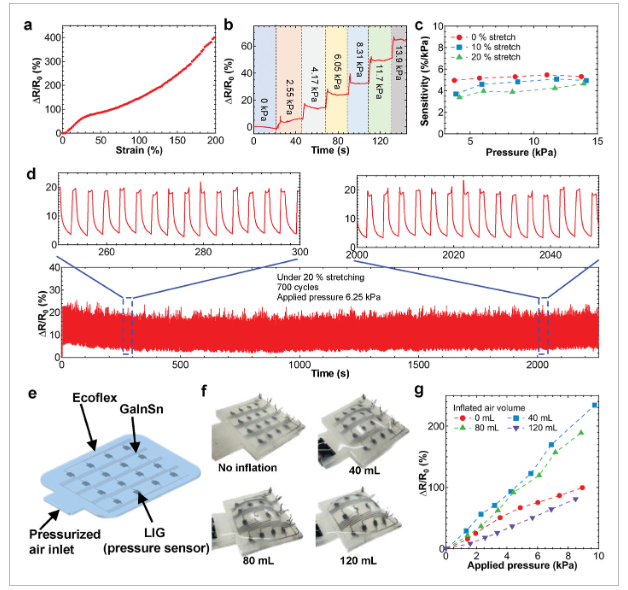
图3、拉伸或充气过程中的压力传感器特性
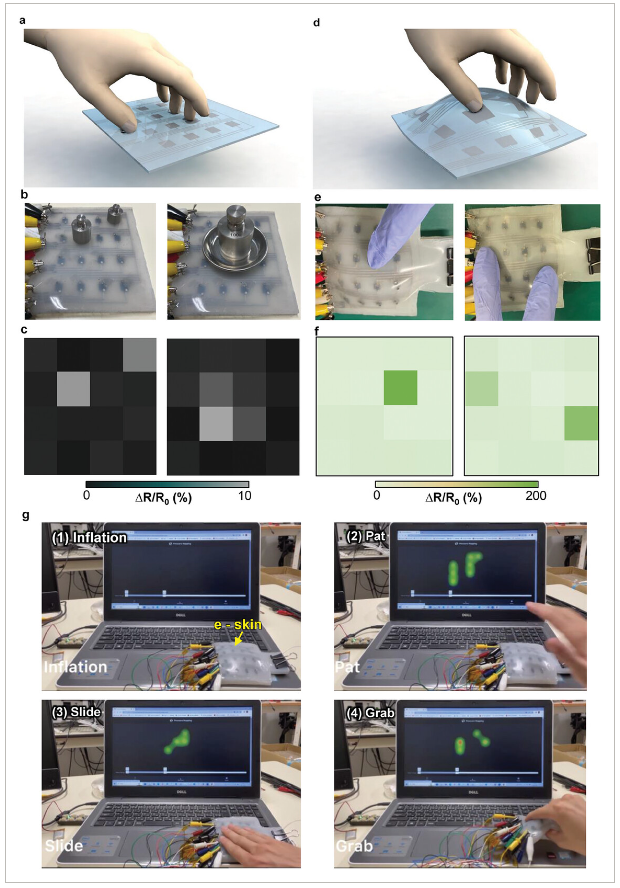
图4、a) 未充气时电子皮肤的示意图、b) 照片和 c) 压力分布图。d) 充入80毫升空气后电子皮肤的示意图、e) 照片和 f) 压力分布图。
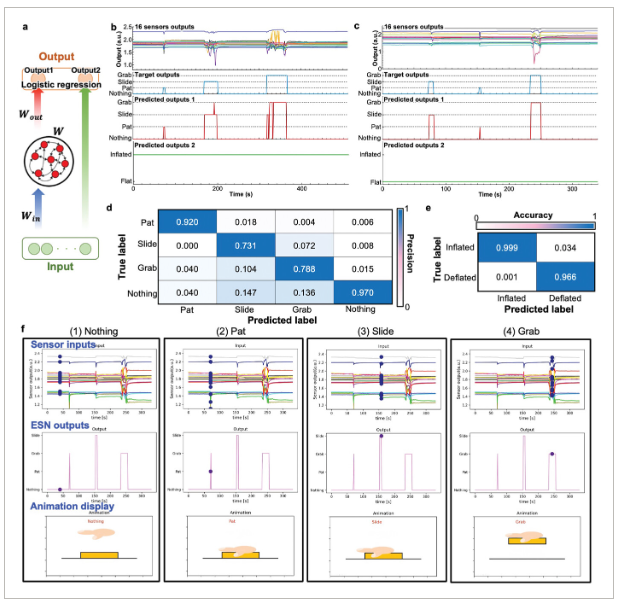
图5、a) 机器学习算法示意图。b) 充气时和 c) 不充气时(平坦状态)的传感器输出、目标输出以及手势和充气的预测输出。d) 动作和 e) 充气的混淆矩阵。f) 传感器输入、ESN 预测输出和动画演示。
小结
综上所述,通过对结构和材料的优化设计,可拉伸压敏电子皮肤即使在拉伸情况下也能表现出良好的耐用性。该压力传感器对施加的压力表现出稳定的电阻变化和较小的滞后,在至少10000次循环中具有较高的稳定性。此外,压力传感器可拉伸 200% 以上,同时保持稳定的电阻变化和灵敏度。为了防止这种情况,我们选用了相对较厚的 ecoflex 弹性聚合物。此外,由于 ecoflex 具有弹性,即使传感器的 LIG 部分被切断,传感器在受损后仍能保持稳定输出至少八周。
最后,作为概念验证,演示了充气和不充气的电子皮肤,并开发了一个使用机器学习的动作识别系统。在平整和充气状态下,都能正确检测到触觉压力映射。更重要的是,根据时间映射结果,使用开发的 ESN 和逻辑回归算法,可以像识别人类皮肤一样,以相对较高的准确率成功识别拍打、滑动和抓取动作。作为电子皮肤的实际应用,设备成本非常重要,尤其是 GaInSn,价格相对昂贵(约3美元/克,本研究中展示的电子皮肤使用了约7 克)。不过,由于 GaInSn的电导率远高于 LIG,因此可以使用较少的 GaInSn 制作更窄更薄的电极图案,从而降低设备成本。我们相信,这一成果将促进人机交互和电子皮肤的发展。
文献:https://doi.org/10.1002/adfm.202313824
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。