
成果简介


由刺激响应材料(如:液晶弹性体、形状记忆高分子和智能水凝胶)制备的致动器在推进仿生软体机器人的发展中显示出良好的应用前景。传统的软执行器通常是在模具内聚合完成,这限制了产品的结构,同时也增加了制造成本。新兴的4D打印利用3D打印技术来创建能够随外部刺激而变化的动态结构。因此,通过结合3D打印技术和刺激响应材料简单快速制备4D可变形结构在各种智能设备的应用中至关重要。
本文,江南大学化学与材料工程学院刘天西教授课题组在《ACS Appl. Polym. Mater》期刊发表名为“4D-Printed Bionic Soft Robot with Superior Mechanical Properties and Fast Near-Infrared Light Response”的论文,研究提出受自然生物的启发,将3D打印与智能水凝胶相结合,制备了一种4D打印海星型仿生软体机器人(SBSR)。
SBSR的主体由还原氧化石墨烯-聚(N-异丙基丙烯酰胺)水凝胶(rGO-PNH)组成,具有优异的力学性能。在3D打印过程结束后,氧化石墨烯纳米片的化学还原赋予rGO-PNH增强的光热转换效果。基于rGO-PNH制备的圆柱形致动器在近红外光照射20秒内迅速向光源弯曲,从而证明了rGO-PNH具有快速的光响应性。此外,4D打印的SBSR可以通过模仿海星的捕食行为,对物体进行有效抓取、提升和释放。这项研究将为刺激响应材料在4D可打印仿生软体机器人中的使用及其在仿生装置和人造肌肉等领域的应用提供见解。
图文导读
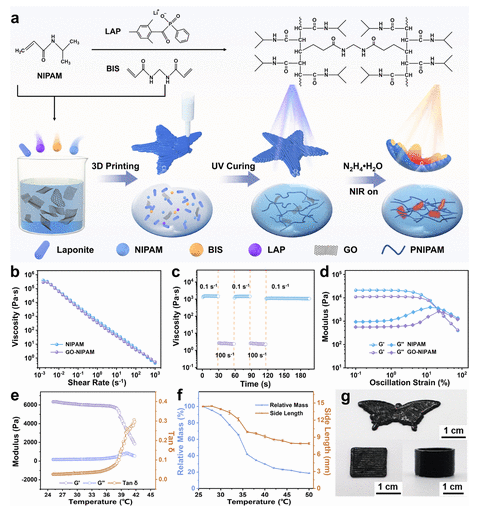
图1. (a) 4D 印刷 SBSR 的制备示意图。(b) 基于 NIPAM 和 GO-NIPAM 的油墨的剪切稀化行为。(c) 角频率为 1 Hz、阶跃剪切速率为 0.1 和 100s-1时,GO-NIPAM 油墨的粘度。(d) NIPAM 和 GO-NIPAM 油墨的应变扫描实验。(e) rGO-PNH 在不同温度下的模量和 tan δ。(f) rGO-PNH 随温度升高的相对质量和边长曲线。(g) 显示印刷的蝴蝶、方形和圆柱图案的照片。
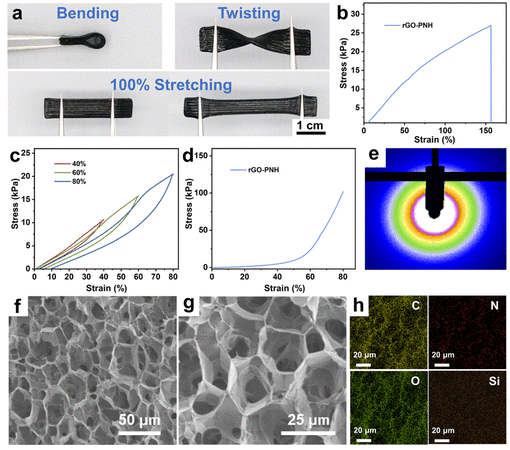
图2. (a) rGO-PNH 在弯曲、扭曲和 100% 拉伸状态下的照片。(b) rGO-PNH 的应力-应变曲线。(c) rGO-PNH 在不同拉伸应变下的典型拉伸加载-卸载曲线。(d) rGO-PNH 的压缩曲线。(e) rGO-PNH 的 SAXS 图谱。(f,g)rGO-PNH 的扫描电镜图像。(h) rGO-PNH 的 EDX 元素图谱。
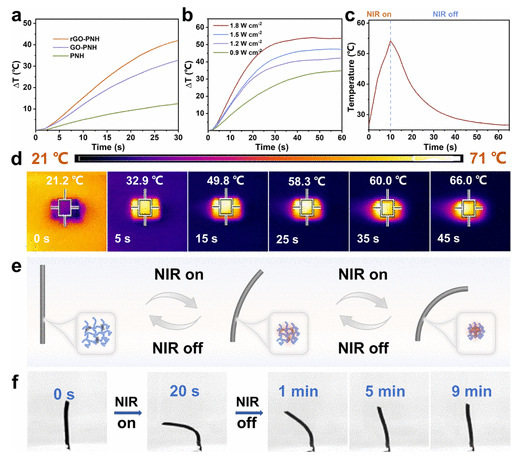
图3. (a) 空气中的近红外光照射(1.5 W cm-2)下,PNH、GO-PNH 和 rGO-PNH 在 30 秒内的光致发光内部温度变化。(b) 在空气中不同辐照强度(0.9、1.2、1.5 和 1.8 W cm-2)下,rGO-PNH 在 60 秒内的光致发光内部温度变化。(c) rGO-PNH 在近红外光照射和自然冷却过程中内部温度的升高(在水下进行)。(d) rGO-PNH 在 1.5 Wcm-2照射强度下的红外热成像(显示为表面温度)。(e)圆柱体的光致发光行为和致动机制示意图。(f) 由近红外驱动的圆柱形致动器的快速反应及其在自然冷却后的恢复行为。
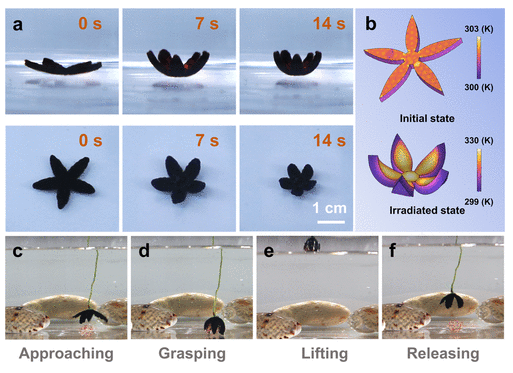
图4. (a) 4D 印刷 SBSR 的光响应行为图像。(b) SBSR 初始状态和照射状态的 COMSOL 仿真。(c) 接近、(d) 抓住和 (e) 提起水中物体时的 4D 印刷 SBSR 照片。(f) 通过 SBSR 在水中的再膨胀释放物体。
小结
总之,通过结合大自然的灵感和4D打印技术提供的设计自由度,作者方便地制备出了一种基于响应性聚合物的 SBSR。rGO-PNH 是通过在热 PNIPAM 凝胶中加入 GO 纳米片,然后进行化学还原合成的。这种方法使反应材料适用于三维打印技术,同时还具有良好的光热转换和优异的机械性能。使用 rGO-PNH 制成的圆柱形致动器表现出快速的光致发应性,能够在 20 秒内弯曲并朝向光源。通过模仿海星的捕食过程,SBSR 成功完成了抓取、提升和释放物体等任务。这项研究对4D可打印SBSR领域的响应性聚合物材料的发展具有重要意义,展示了其在智能设备和人工致动器等不同领域的应用潜力。
文献:https://doi.org/10.1021/acsapm.3c02936
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。