
成果简介
随着可穿戴电子设备的快速发展,人们迫切需要应变范围宽、灵敏度高、响应速度快、耐用性强的可拉伸应变传感器。本文,安徽大学Xiaohui Guo、Xiaohui Guo等研究人员在《Composites Part A: Applied Science and Manufacturing》期刊发表名为“Dual bionic-inspired stretchable strain sensor based on graphene/multi-walled carbon nanotubes/polymer composites for electronic skin”的论文,研究提出了一种具有指纹图案和仿生物莲藕纤维结构的双仿生启发式可拉伸应变传感器(DBSSS)。
硅橡胶(SR)用作传感器的封装层,多壁碳纳米管(MWCNT)用作连接石墨烯(GN)纳米层压板的导电桥。两种组合导电材料与指纹图案结构的良好配合大大增强了 DBSSS 的传感功能。DBSSS 具有灵敏度高(GF=35.33)、应变感应范围宽(0-145%)、响应速度快(∼80 ms)和耐用性好(大于 5000 次)等特点。因此,基于 DBSSS 的优异综合性能,它可以准确地实现手势识别、人体微表情监测和莫尔斯电码检测,显示了电子皮肤的广阔应用前景。
图文导读
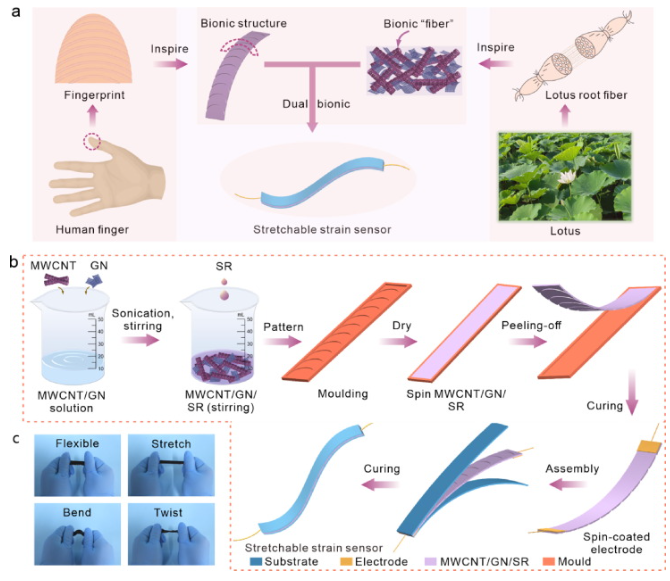

图1.DBSSS的整体设计。(a) 双仿生启发的可拉伸应变传感器。(b) DBSSS的制备过程。(c) DBSSS的实物演示。
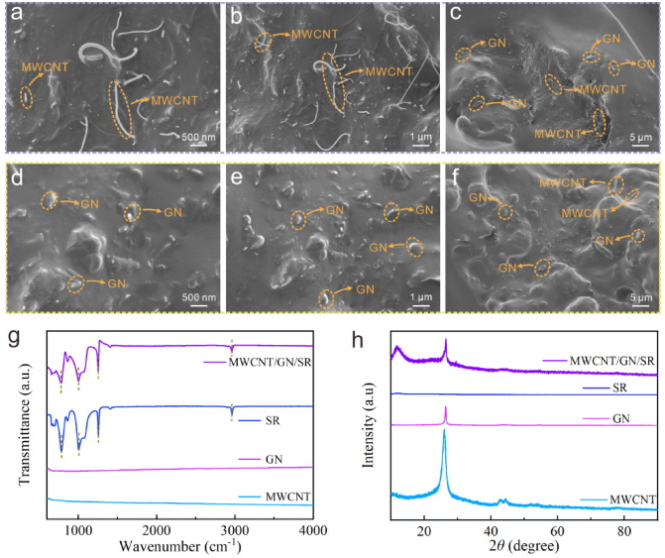
图2:(a-c)SEM图像显示用0.1g MWCNT 和0.1g GN制备的 MWCNT/GN/SR 复合材料。(d-f)SEM图像显示使用 0.05g MWCNT和0.2g GN制备的 MWCNT/GN/SR 复合材料。(g)MWCNT/GN/SR、SR、GN和MWCNT的傅立叶变换红外光谱。(h) MWCNT/GN/SR、SR、GN 和 MWCNT 的 XRD 图像。
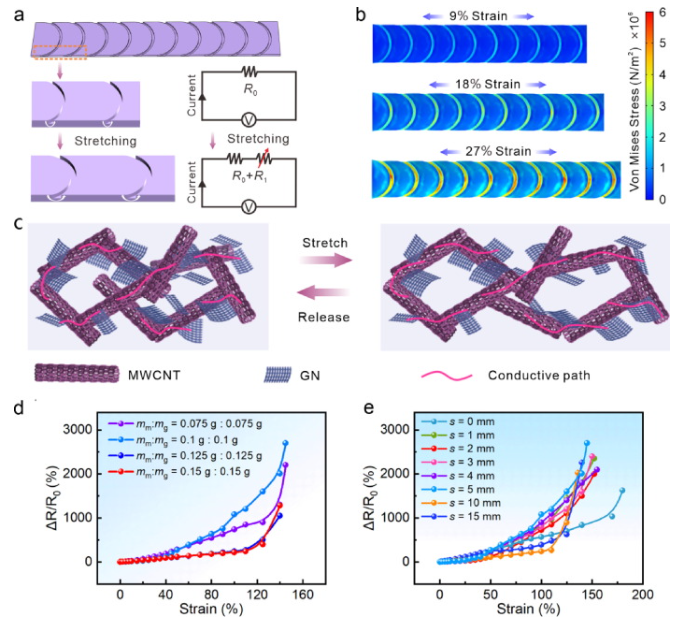
图3. (a) DBSSS 传感机制等效示意图。(b) 不同应变下 DBSSS 的应力分布。(c) DBSSS 的拉伸/释放机制。(d) 不同质量导电填料的 DBSSS 电阻随应变的变化。(e) 不同间距仿生结构的 DBSSS 电阻随应变的变化。
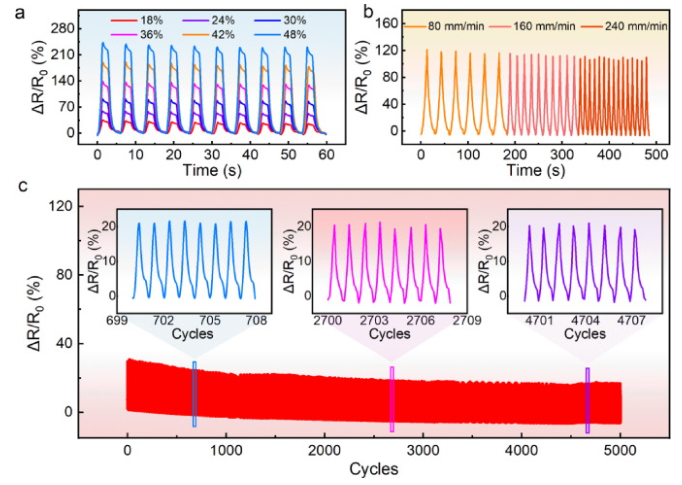
图4. (a) DBSSS 在不同应变(18%、24%、30%、36%、42% 和 48%)下的重复循环实验。(b) 以不同速率(80、160 和 240 毫米/分钟)对 DBSSS 进行循环测试
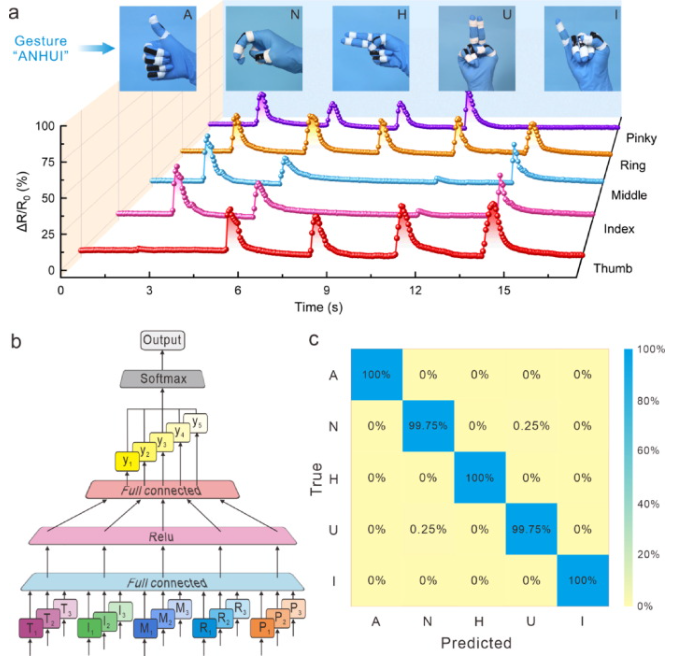
图5. DBSSS 手部动作的实时响应。(a) 手语动作。(b) 基于 DL 分类算法的手势感知神经网络结构 (c) 使用混淆矩阵的手势识别系统的准确性。
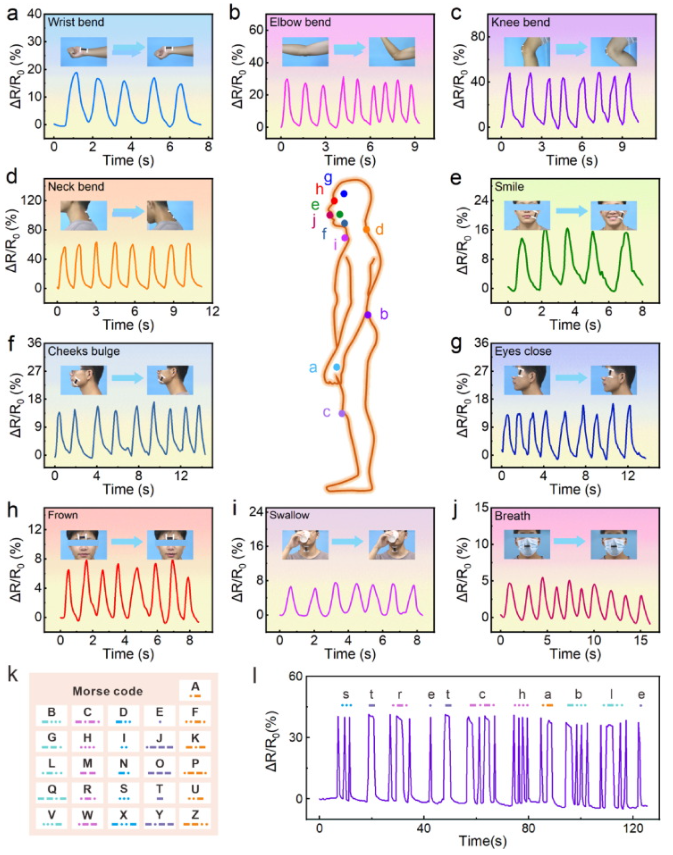
图6. 用于人体运动监测的 DBSSS 应用
小结
综上所述,本研究受仿生指纹图案和仿生莲藕纤维结构的启发,设计了基于 MWCNT 和 GN 的 DBSSS。通过设计仿生结构并结合不同的导电填料,基于两种导电材料的良好协作和仿生微结构的 DBSSS 设计方案实现了出色的综合传感性能。DBSSS 的传感范围很宽,GF 值分别为 145% 和 35.33%,并且在拉伸和释放超过 5000 次后仍能保持稳定。基于出色的传感特性,DBSSS 能够稳定可靠地传感各种人体动作,包括准确检测手语识别、人体微表情和摩尔斯电码检测,这使其在电子皮肤等领域具有广阔的应用前景。
文献:https://doi.org/10.1016/j.compositesa.2024.108043
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。