
成果简介

最近,柔性机械刺激传感器在可穿戴设备和软机器人领域引起了广泛关注。由于垂直石墨烯纳米壁(VGNs)具有高拉伸性,因此成为柔性应变传感器的理想候选材料。本文,江苏大学王权 教授团队中国科学院上海微系统与信息技术研究所吴天如 副研究员等在在《SENSOR ACTUAT A-PHYS》期刊发表名为“Transfer-free preparation of flexible strain sensors using high quality VGNs”的论文,研究利用电感耦合等离子体化学气相沉积(IC-PECVD)方法,在 600 ℃ 下的氟锂云母基底上成功制备了基于无转移 VGNs 的柔性应变传感器。通过增加 H2 与 CH4 的比例,生长的 VGNs 的质量得到明显改善。在电极间直接制备的 VGNs 能改善 VGNs 与电极间的界面接触。弯曲试验结果表明,在数字间电极上直接生长 VGNs 的柔性传感器具有良好的性能。套管与传感器的结合表明,无转移柔性应变传感器可在可穿戴设备中发挥良好的性能。
图文导读
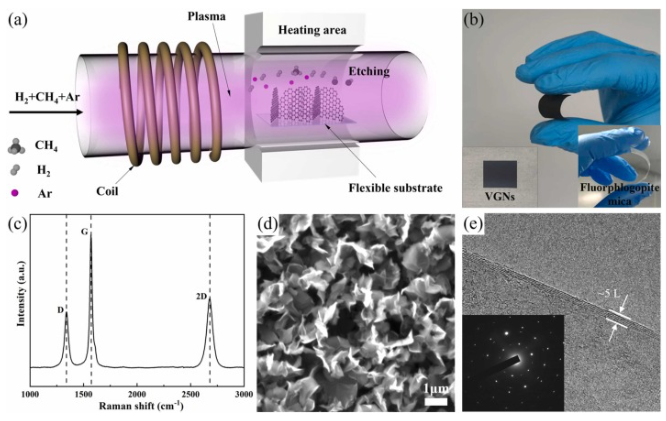
图1.(a) PECVD方法示意图。(b) 氟金云母上垂直石墨烯的数字图片。(c)高质量VGNs的拉曼光谱。(d)在氟金云母上制备的VGNs的高倍率SEM图像。(e) 在氟金云母上制备的VGNs的透射电镜。
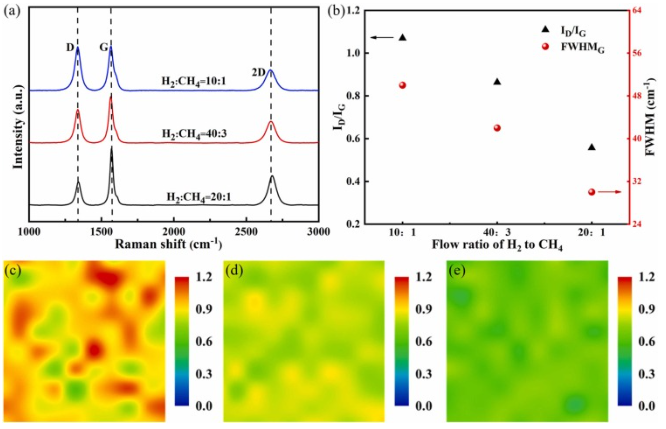
图2. (a) 用不同比例的 H2 和 CH4 制备的 VGN 的拉曼光谱。(b) 不同 H2 和 CH4 比例制备的拉曼光谱的 ID/IG 和 FWHMG。(c)-(e) 不同 H2 与 CH4 比例(10:1、40:3、20:1)下 VGN 的拉曼 ID/IG 图谱。
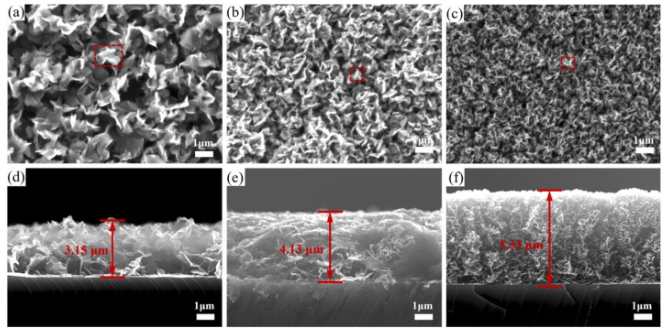
图3:VGN 的扫描电镜
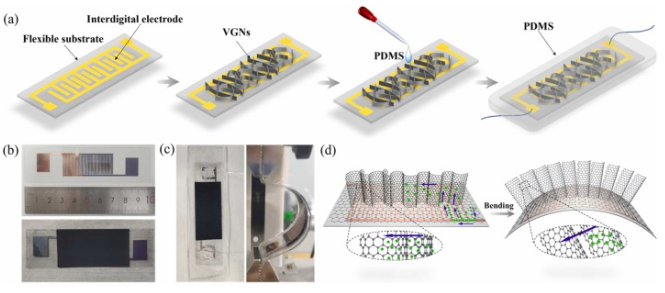
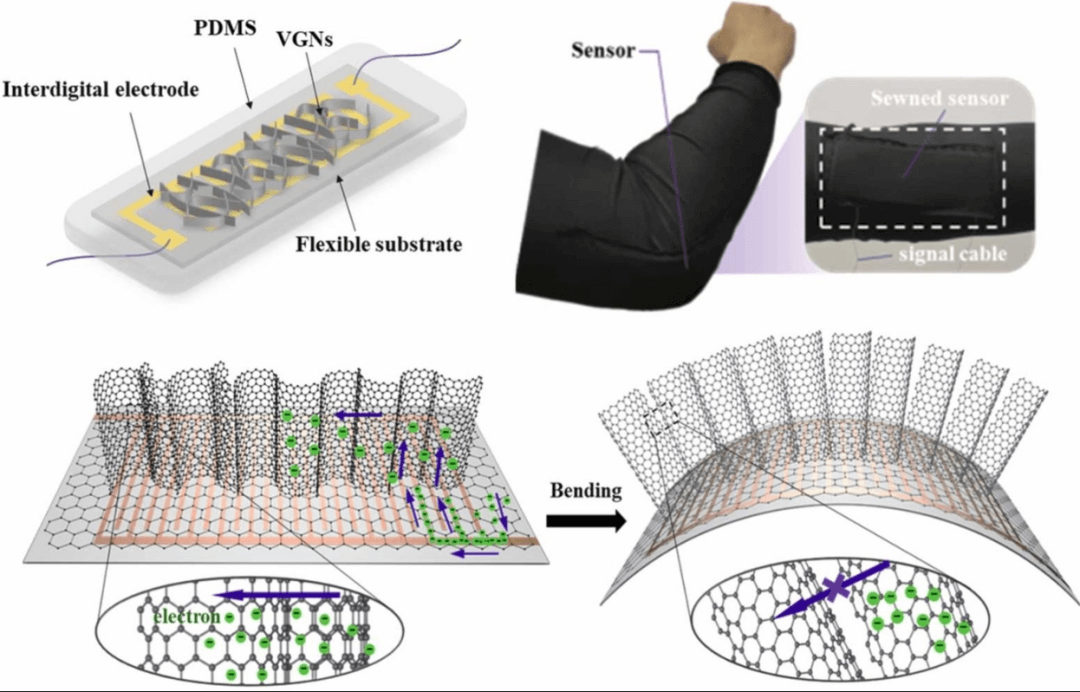
图5. (a) 无转移柔性传感器的制备。(b)Interdigital electrode on fluorphlogopite mica and VGNs on the interdigital electrode。(c) 柔性传感器的数字图像和弯曲图。(d) 弯曲过程中 VGN 的微观变化示意图。
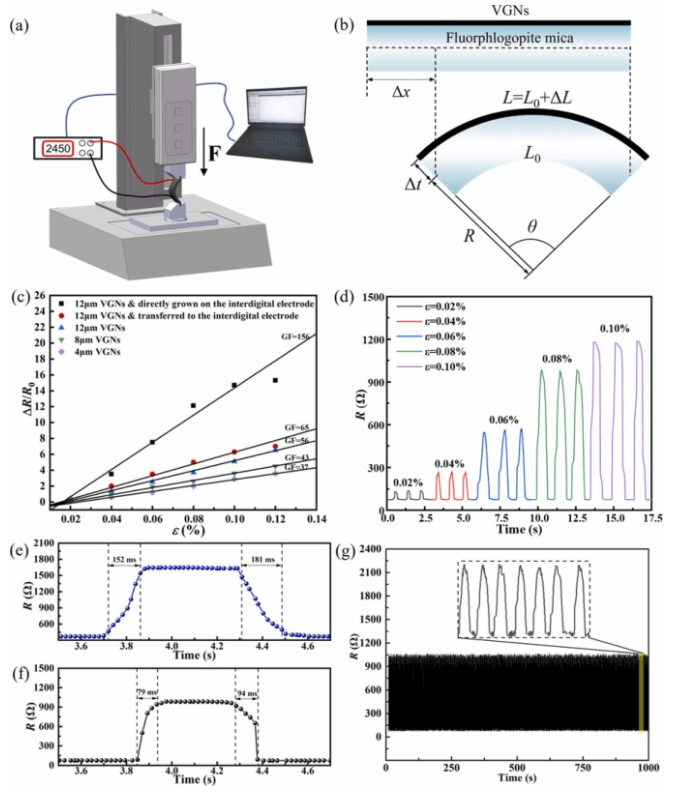
图6. (a) 测试系统示意图。(b) 柔性传感器示意图。(c) 柔性传感器的灵敏度图。(d) 传感器的响应曲线。(e) 不带数字间电极的传感器的响应和恢复时间。(f) 带有数字间电极的传感器的响应和恢复时间。(g) 传感器在 0.12% 应变下的循环测试曲线。
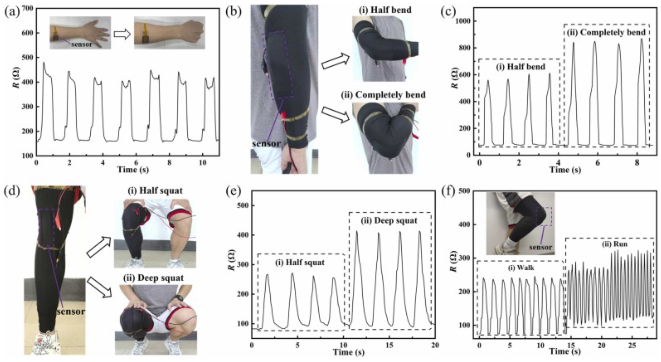
图8. 身体不同部位的柔性传感器应用图片
小结
由于荧光云母耐高温,我们可以直接在 PECVD 装置的互电极上制备 VGN。在温度超过 600 ℃、射频源功率超过 300 W、氢气和甲烷的气体流量比大于 20:1 的条件下,可以制备出缺陷密度低、结晶度好的垂直石墨烯。柔性传感器具有良好的弯曲灵敏度(GF as156)、较低的响应时间和恢复时间(响应时间 79 毫秒,恢复时间 94 毫秒)。我们测试了传感器在不同弯曲角度下的电气性能。结果发现,0° 至 180°的弯曲角度具有良好的响应性能。这种出色的弯曲性能可用于可穿戴设备。在下一步工作中,我们将研究纳米云母片层结构的特性,以便通过进一步优化制备技术来提高材料的性能和稳定性。此外,我们还利用基于 VGNs 的传感器来监测人体的手部握力、肘部弯曲、跑步和行走状态。结果表明,无转移制备的柔性传感器具有良好的性能,并揭示了无转移 VGNs 在柔性可穿戴设备中的潜在应用。
文献:https://doi.org/10.1016/j.sna.2023.114949

本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。