
成果简介
水下对各种力的感知在水上探险活动中具有重要意义,而柔性触觉传感器的实现面临技术挑战。本文,浙江大学汪延成 教授 团队在《ADVANCED MATERIALS TECHNOLOGIES》期刊发表名为“Waterproof and Flexible Aquatic Tactile Sensor with Interlocked Ripple Structures for Broad Range Force Sensing”的论文,研究介绍了一种基于防水石墨烯(GR)/碳纳米管(CNT)/聚二甲基硅氧烷(PDMS)复合材料的新型柔性水下触觉传感器。所制备的石墨烯/碳纳米管/PDMS 复合材料具有优异的疏水和机电性能,水接触角超过 134°,测量系数高达2296,是水下大范围力传感的理想压阻传感材料。所提出的触觉传感器具有3×3个传感单元,并采用双互锁水波纹结构来提高灵敏度和力检测范围。
制成的触觉传感器具有两种不同的灵敏度:在 0.062-150 kPa 时灵敏度高,为 0.0338 kPa-1;在 150-450 kPa 时灵敏度低,为 0.00357 kPa-1。此外,该传感器在水生环境中表现出卓越的电阻响应、快速动态恢复以及机械和电气稳定性。然后,将水生触觉传感器佩戴在人的手掌上,检测抓取不同形状和硬度的物体时接触力的分布和变化,展示了所开发的水生触觉传感器在水下应用于大范围力传感的潜力。
图文导读
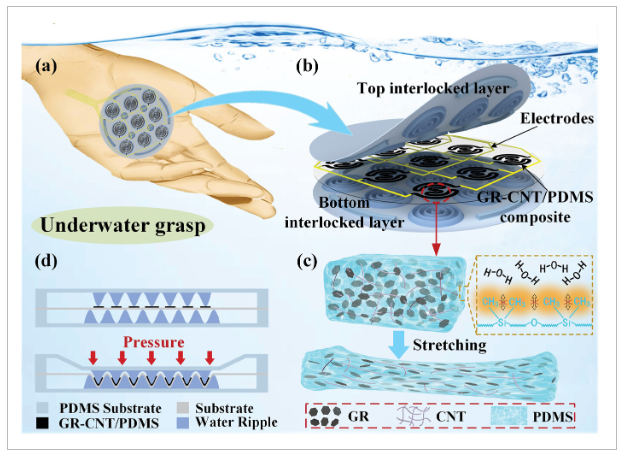

图1、柔性水生触觉传感器示意图
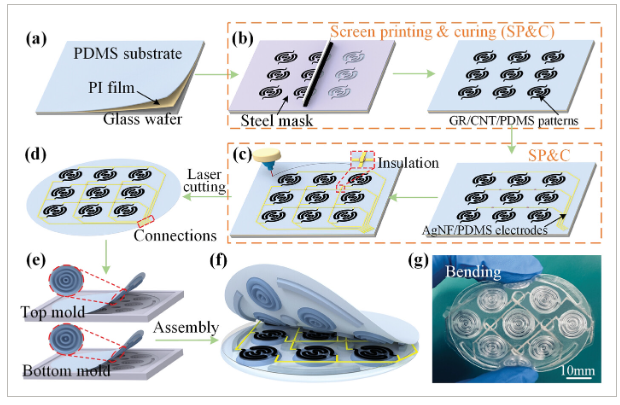
图2、触觉传感器的制造程序
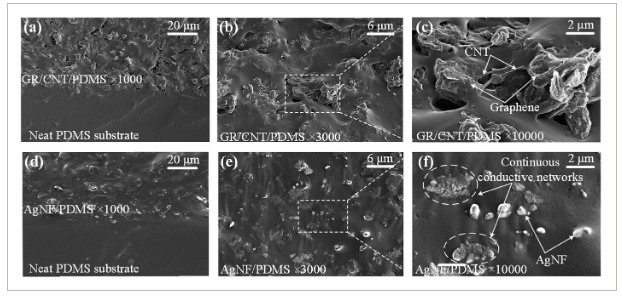
图3、a-c) GR/CNT/PDMS纳米复合材料和d-f)AgNF/PDMS纳米复合材料的横截面和前视图形貌。
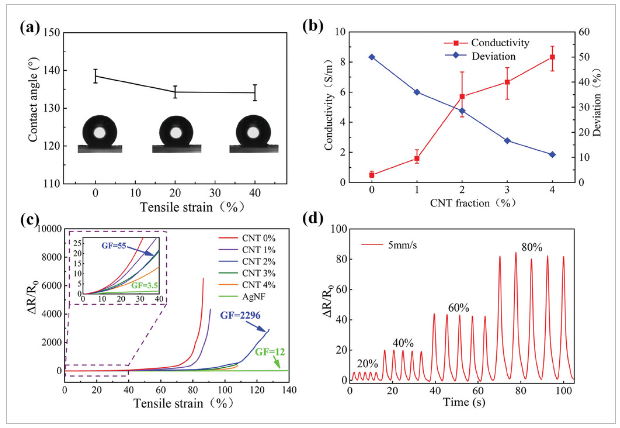
图4、GR/CNT/PDMS复合材料的性能
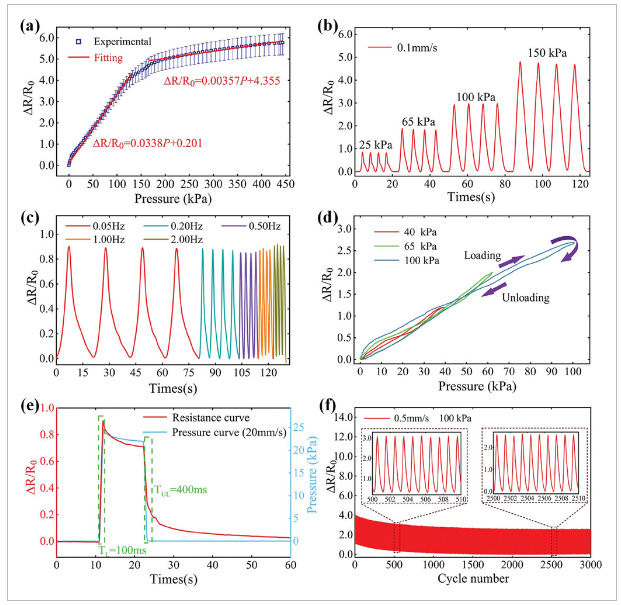
图5、触觉传感器水下测试的传感性能
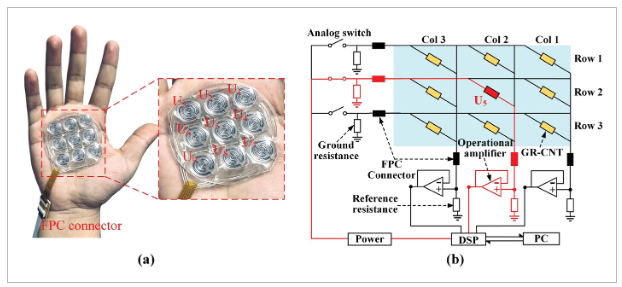
图6、a) 佩戴在手掌上的水生触觉传感器的照片;b) 扫描电路原理图。
图7、用于水下抓取应用的水生触觉传感器
小结
综上所述,我们提出了一种新型柔性水上触觉传感器,该传感器采用双互锁水波纹结构,以提高其力感应灵敏度和范围。我们制备了防水的 GR/CNT/PDMS 复合材料作为传感材料,并使用 PPMS 改善了 GRs 和 CNTs 在 PDMS 基材中的分散性。材料测试表明,GR/CNT/PDMS 复合材料具有优异的疏水性能,即使在 40% 的拉伸应变下,水接触角也超过 134°。在 128%的拉伸应变下,复合材料的 GF 值为 2296,远高于 AgNF/PDMS 电极在 140% 拉伸应变下的12GF 值。表征测试表明,水生触觉传感器具有两种灵敏度,可进行广泛的力感应:在 0.062-150kPa 时灵敏度高,为 0.0338kPa-1;在 150-450 kPa 时灵敏度低,为 0.00357kPa-1。此外,该触觉传感器还具有良好的电阻响应、快速恢复和稳定的水下重复性。水下物体抓取实验表明,所开发的水下触觉传感器能够准确检测抓取不同形状和硬度物体时的接触力分布。在今后的工作中,将进行水下触觉传感器的结构设计,以便与水下机器人技术相结合,并将水下触觉传感器应用于深水下的物体操作。
文献:https://doi.org/10.1002/admt.202301513
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。