
成果简介
人工水凝胶电子皮肤(E-skin)传感系统因其提供触觉感知的能力而备受关注。水凝胶电子皮肤的最新进展是通过构建传感器阵列来同时感知触摸位置和压力。然而,制作过程十分复杂,传感分辨率也受到阵列单元大小和数量的限制。本文,河北工业大学胡宁教授团队等在《Cabron》期刊发表名为“A 3D cross-linked hierarchical hydrogel E-skin with sensing of touch position and pressure”的论文,研究报告了一种基于嵌入碳纳米材料的聚乙烯醇(PVA)水凝胶的多模态传感电子皮肤,它无需构建阵列即可同时识别触摸位置和压力。
结合一维纳米管和二维石墨烯纳米片电子传递效率高的优点,提出了三维分层交联聚多巴胺(PDA)修饰还原氧化石墨烯(rGO)/羧基多壁碳纳米管(MWCNT-COOH)复合材料作为导电填料,通过纳米掺杂添加到水凝胶基底中,使水凝胶获得与人体皮肤相似的弹性模量和拉伸性。同时,由于导电网络的稳定性和碳纳米材料的压阻特性,我们采用了表面电容式触摸(SCT)系统和压阻技术来感知触摸位置和压力。我们的电子皮肤装置具有卓越的传感性能,为设计新型电子皮肤传感器装置提供了新的方向。
图文导读
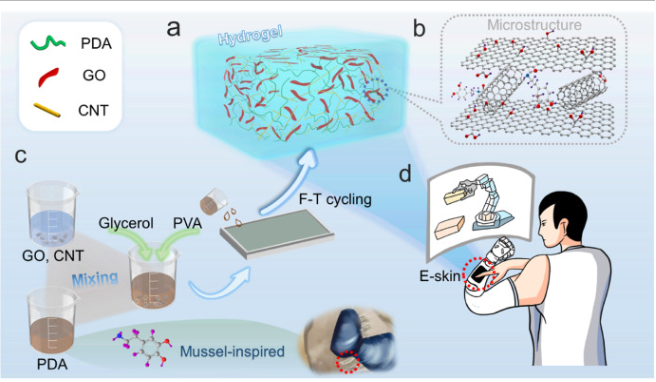

图1.制备PGC/PVA(GW)水凝胶。
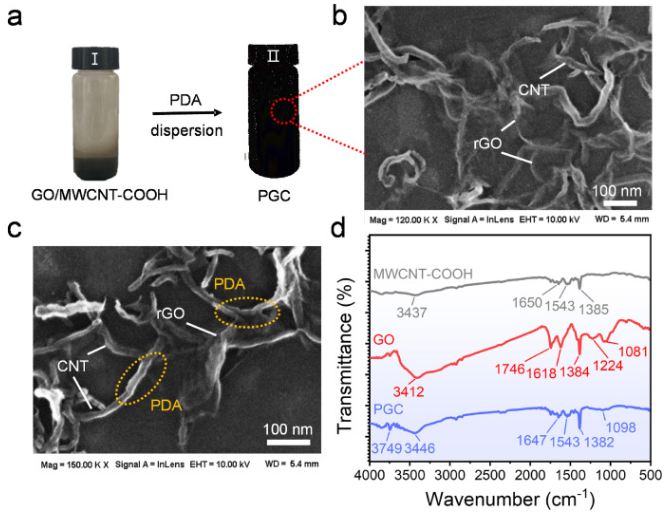
图2.PGC填料的表征
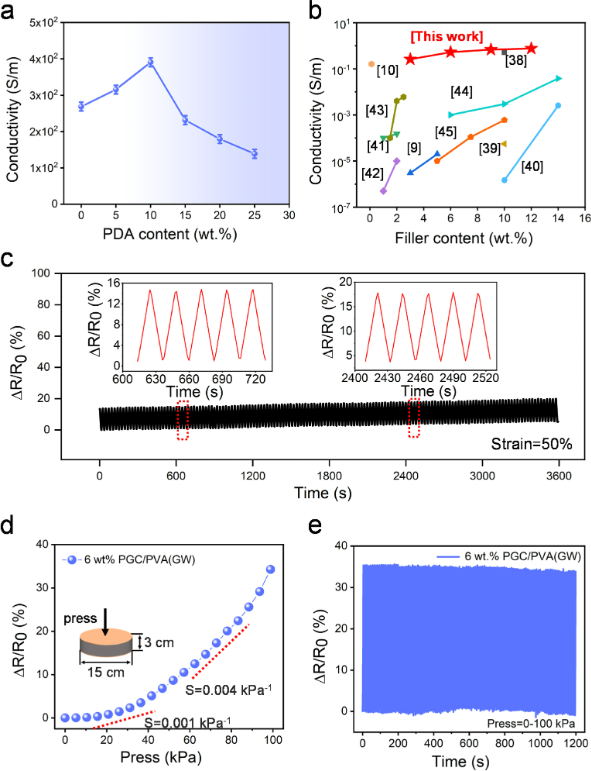
图3.PGC 和 PGC/PVA (GW) 水凝胶的电导率测试
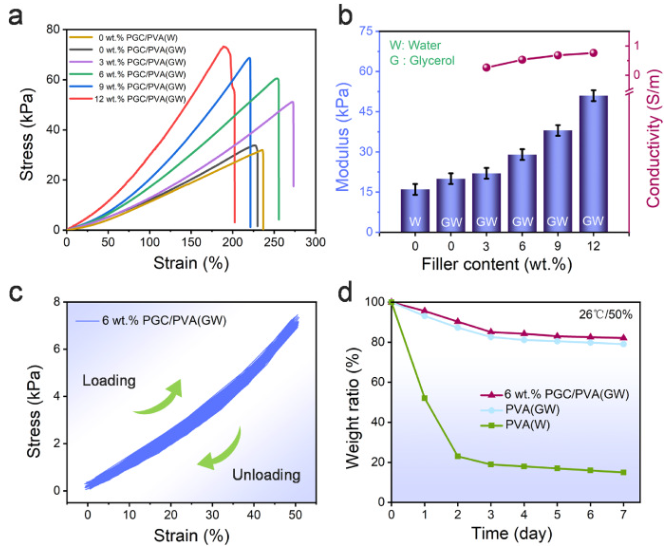
图4.拉伸应力-应变分析和保水能力
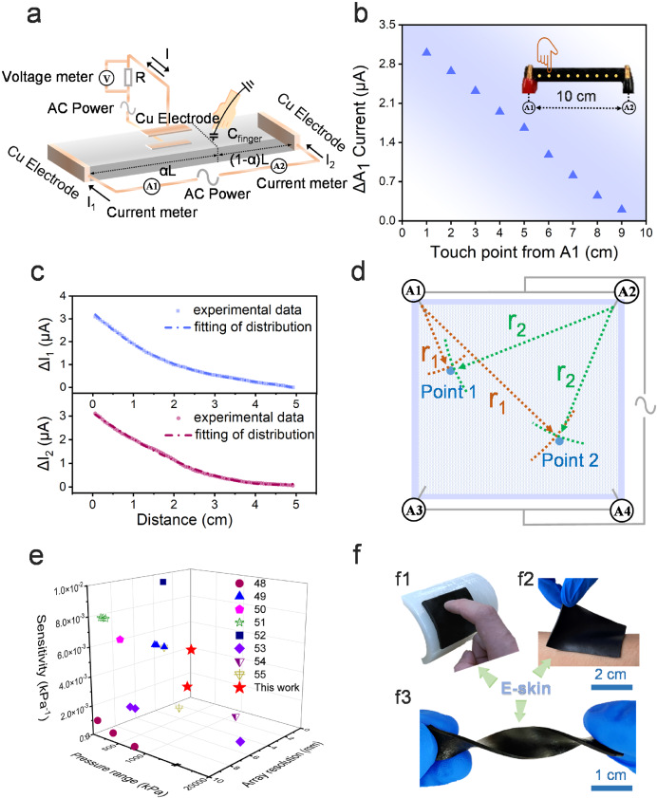
图5.触摸位置和压力的电子皮肤识别
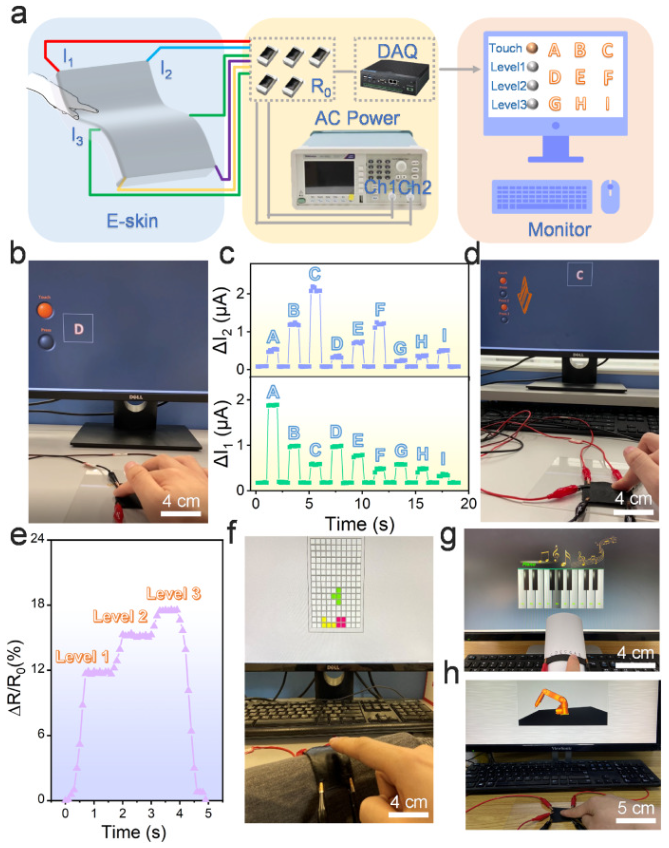
图6.水凝胶E-skin的功能演示
小结
总之,我们成功开发了一种具有可调机械性能和保水能力的水凝胶 E 皮肤,可同时识别触摸位置和压力。我们的方法包括使用 PDA 还原 GO,并将其与 MWCNT-COOH 分子间结合形成均匀的分散体,然后将其用作导电填料来修饰水凝胶 E 皮肤。为了获得理想的机械性能和保水性,我们选择了 PVA 作为基质,并使用了由甘油和水组成的二元溶剂。然后,我们采用一种特殊的冷冻-慢融(-26°C-26°C)物理交联方法来制造 E 皮肤。通过纳米掺杂控制 6 wt% PGC 的质量,优化了 E 皮肤的机械性能,使其接近人体皮肤,弹性模量为 29 kPa,极限拉伸应变为 255%,极限拉伸强度为 60.5 kPa。我们还添加了甘油,以提高 E 皮肤的保水能力。此外,我们还结合了表面电容式触摸(SCT)方法和压阻传感方法,以同时识别触摸位置和压力。本研究开发的水凝胶 E 皮肤具有柔韧性、可拉伸性和生物相容性,能快速识别触摸位置(<167 毫秒)并对压力信号做出响应(88 毫秒)。这些特点使其不仅有望用于机器人皮肤,还可用作人类手臂上的控制器来发送指令信号。这项技术有可能彻底改变机器人领域,推动下一代假肢的开发。总之,我们相信这一创新战略将为智能机器人和假肢的未来带来令人兴奋的机遇。
文献:https://doi.org/10.1016/j.carbon.2023.118514
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。