
成果简介
柔性触觉传感器在便携式医疗保健和环境监测应用中显示出巨大的潜力。然而,在扩大具有实时反馈功能的稳定触觉传感器的制造规模方面仍然存在挑战。本文,中国科学院空间应用工程与技术中心赵伟 副研究员、王功 研究员在《Acs Nano》期刊发表名为“Templated Laser-Induced-Graphene-Based Tactile Sensors Enable Wearable Health Monitoring and Texture Recognition via Deep Neural Network”的论文,研究展示了一种稳健的方法,通过激光划线、弹性体热压转移和三维打印银电极来制造基于模板激光诱导石墨烯(TLIG)的触觉传感器。
以不同的网格砂纸为模板,实现了传感性能可调的 TLIG 传感器。该触觉传感器具有出色的灵敏度(0-7 kPa 范围内为 52260.2 kPa-1)、宽检测范围(高达 1000 kPa)、低检测限(65 Pa)、快速响应(响应/恢复时间为 12/46 ms)和出色的工作稳定性(10000 次循环)。得益于 TLIG 的高性能和防水性,TLIG 传感器可用作健康监测器,甚至可用于水下环境。TLIG 传感器还可以集成到阵列中,作为软机器人抓手的感受器。此外,基于卷积神经网络的深度神经网络被用于通过软 TLIG 触觉传感阵列进行纹理识别,在不同表面粗糙度的物体上实现了 94.51% 的总体分类率,因此在实时实际应用场景中具有很高的准确性。
图文导读
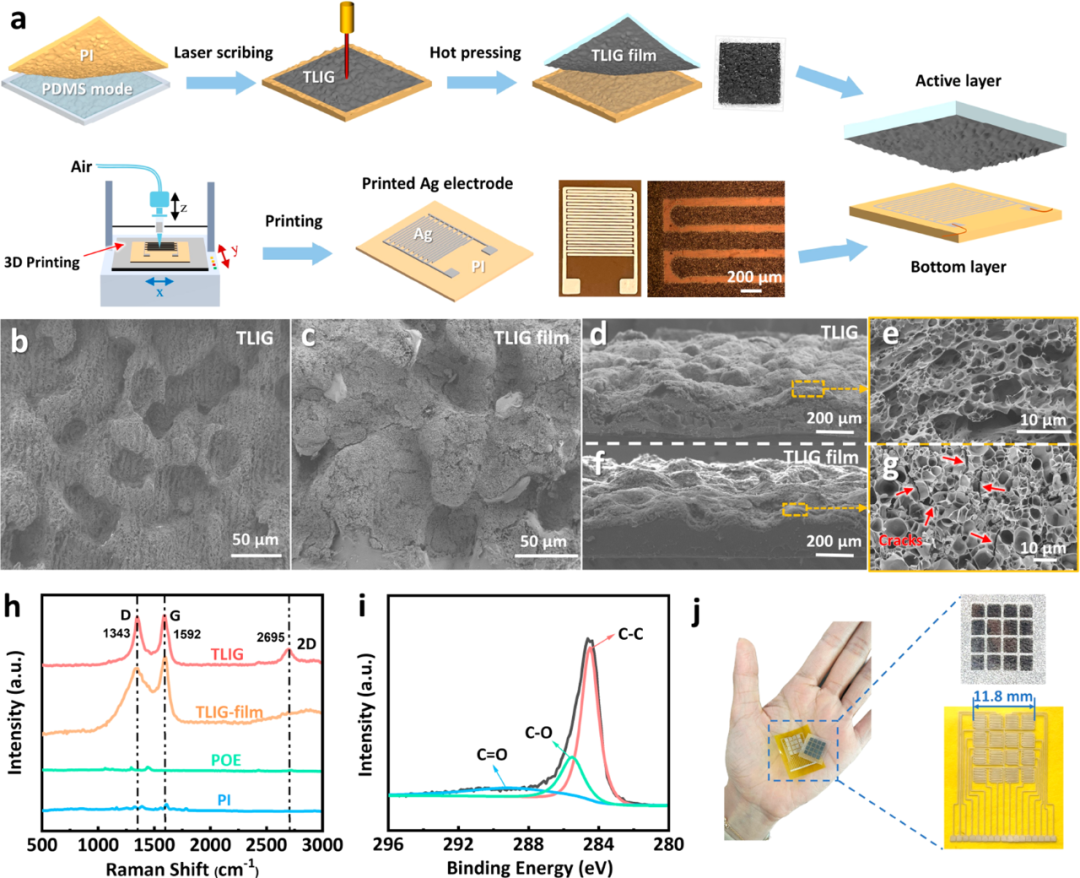

图1.基于TLIG的触觉传感器的制造和表征。
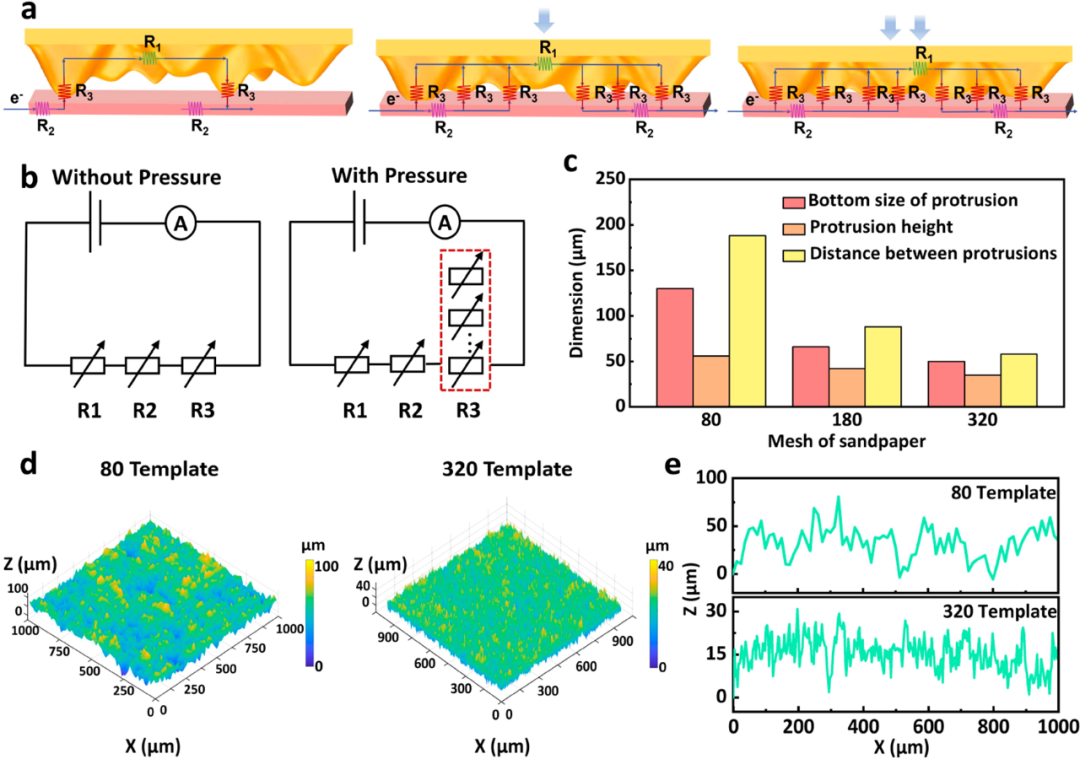
图2.基于TLIG的触觉传感器传感机理分析.
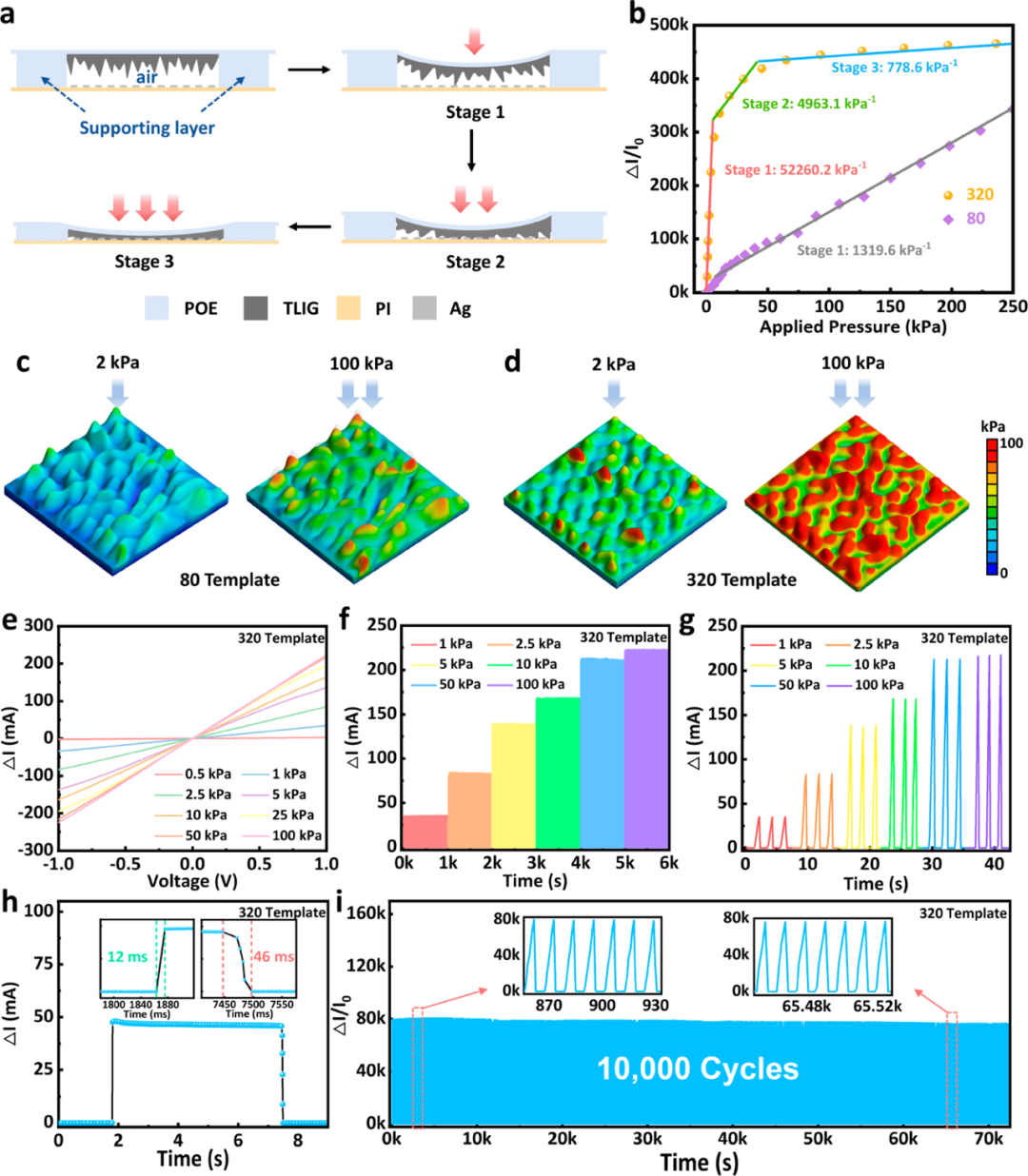
图3.基于 TLIG 的触觉传感器的机电性能
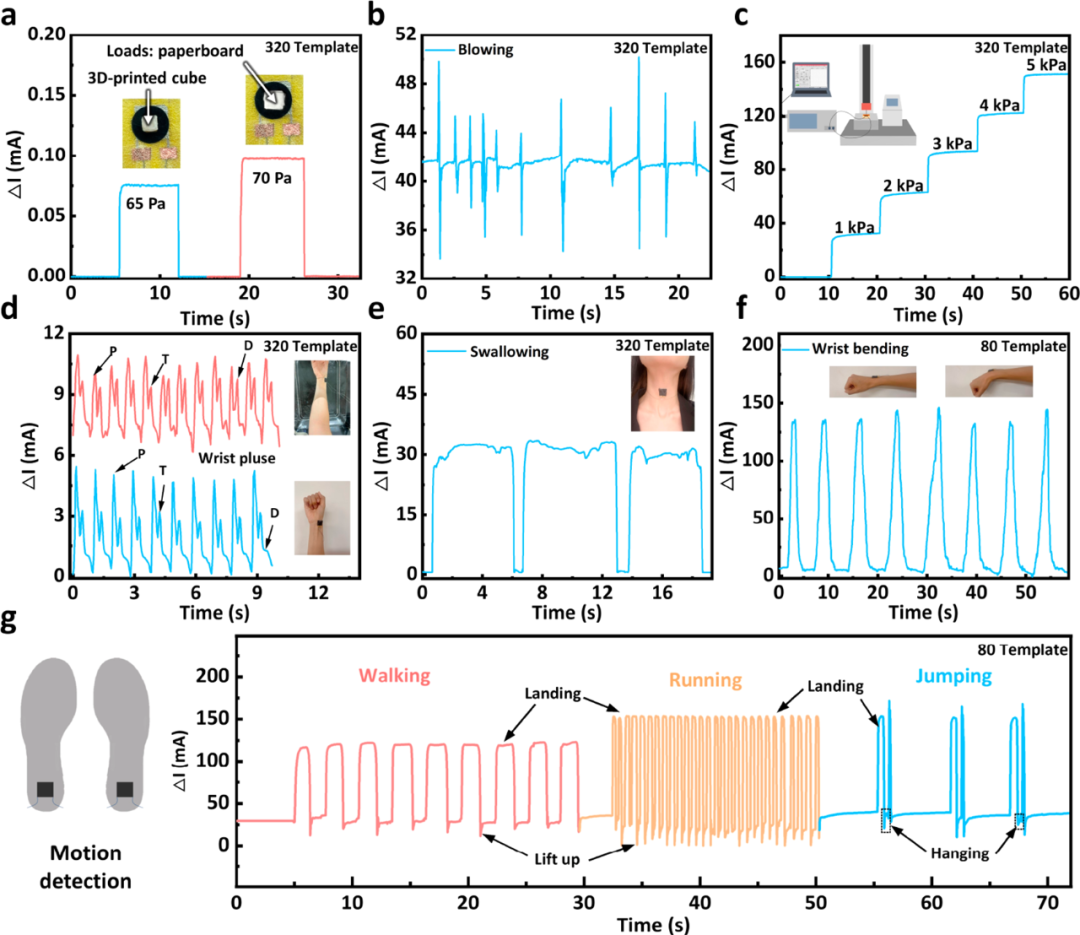
图4.基于TLIG的触觉传感器的应用
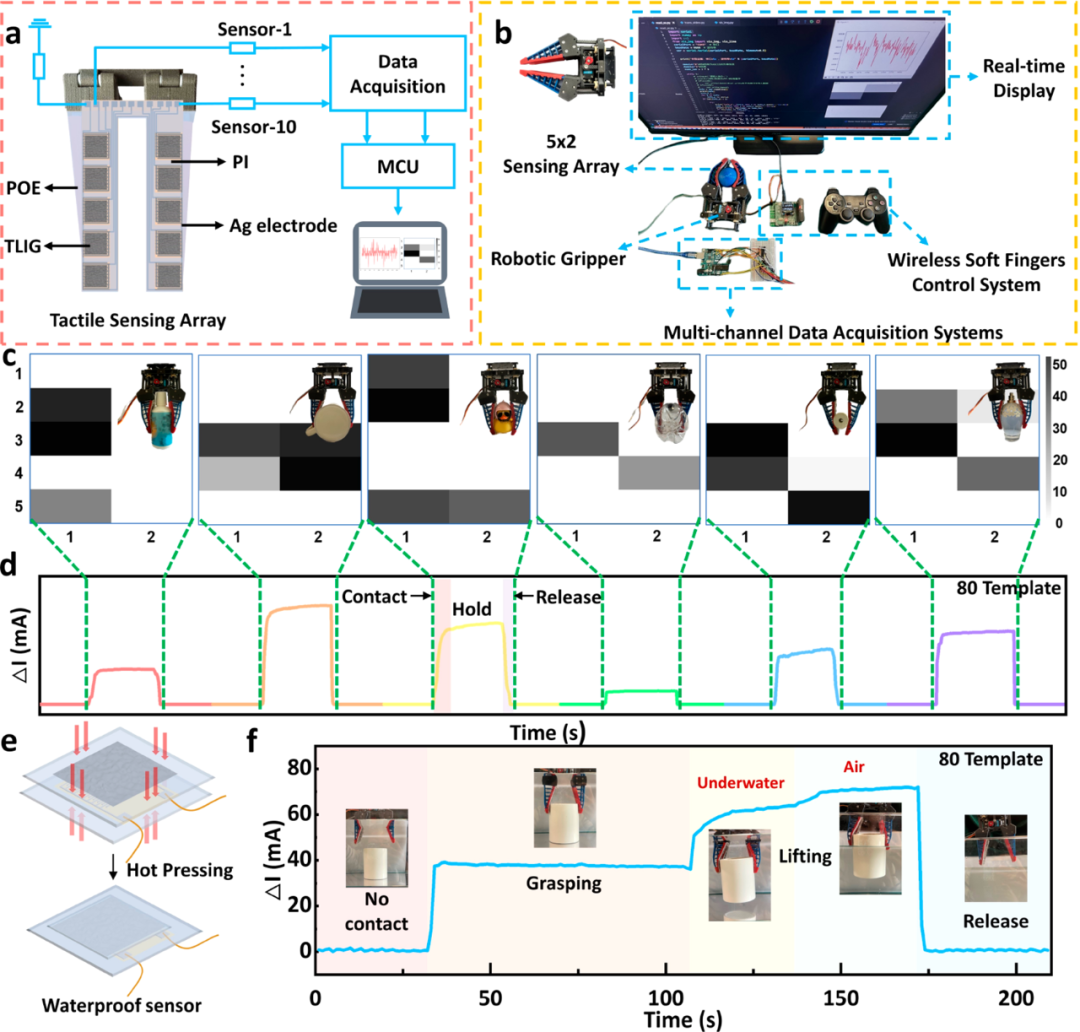
图5.集成在无线软夹持器上的基于TLIG的触觉传感阵列系统的结构与应用
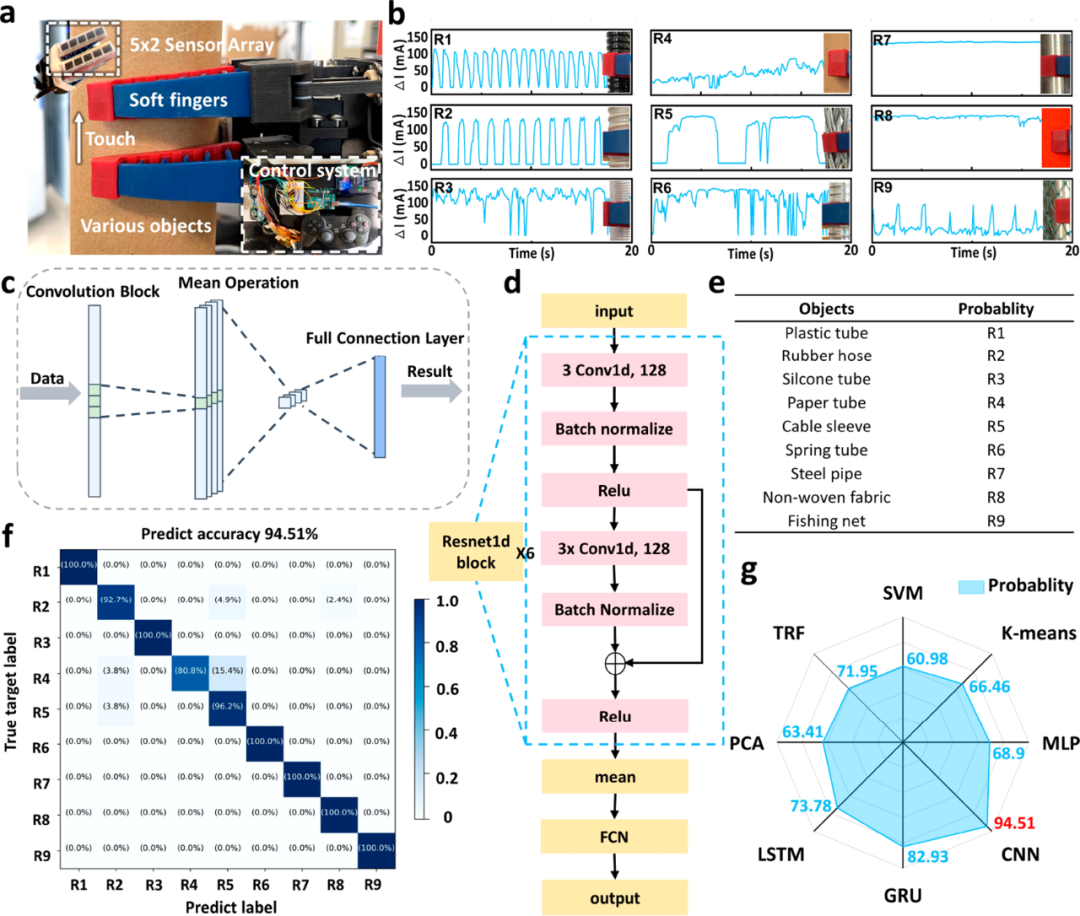
图6.用于纹理识别的卷积神经网络。
小结
本文提出了一种通过模板化激光诱导石墨烯薄膜和热压方法制造 TLIG 薄膜的简便方法。结合三维打印的银电极,TLIG 薄膜可以集成到压力监测和纹理触觉感知的触觉传感阵列中。系统地研究了由不同网格模板衍生的 TLIG 触觉传感器的传感特性和机制。传感器具有高灵敏度,在 0-7 kPa 范围内灵敏度超过 52260.2 kPa-1,在 0-1000 kPa 范围内具有宽广的压力响应范围,快速响应/恢复时间为12/46ms,检测限低至 65 Pa。传感器可检测的压力范围很广,从轻压(气流和振动)到低压(脉搏和各种人体运动),直至高压(步态监测),这为电子皮肤、机器人和人工智能提供了巨大潜力。
此外,基于 TLIG 的触觉传感器具有出色的可设计性、防水性以及在 2 kPa 压力下 10000 次循环的可靠压阻特性,确保传感器在各种应用环境下都能保持稳定的信号输出。最后,我们采用了基于 CNN 的深度神经网络来实现触觉纹理感知。对九个不同粗糙度的物体的整体分类率达到了 94.51%,在实时实际应用场景中表现出了很高的准确性。
文献:https://doi.org/10.1021/acsnano.3c05838
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。