
准确可靠的脑电图(EEG)干式传感器的可用性对于实现脑机接口(BMI)的大规模部署至关重要。然而,与黄金标准的Ag/AgCl湿式传感器相比,干式传感器无一例外地显示出较差的性能。在监测头皮上的毛发和弯曲区域的信号时,干式传感器的性能损失更加明显,这需要使用笨重和不舒服的尖状传感器。这项工作展示了基于亚纳米厚外延石墨烯的三维微图案传感器,用于检测来自头皮枕部的挑战性脑电信号。枕部对应于大脑的视觉皮层,是基于常见的稳态视觉诱发电位范式的BMIs实施的关键。图案化外延石墨烯传感器显示出高效的皮肤接触和低阻抗,并且可以实现与湿式传感器相当的信噪比。使用这些传感器,本研究还证明了通过大脑活动与四足机器人进行免提通信。
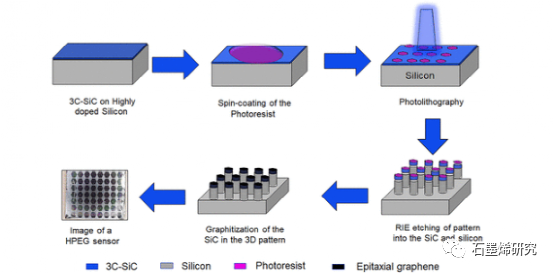

图1. 微图案石墨烯传感器的制造过程示意图。
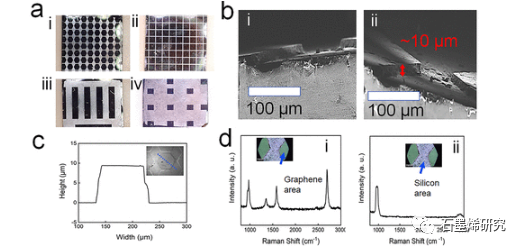
图2. (a) 四种传感器图案(正方形、六角形、条形和点形)的显微镜图像。(b) 微图案的SEM横截面图像。(c) 用轮廓仪沿着插图中的虚线测量微图案的高度。(d) 微图案石墨烯传感器的拉曼光谱:(i)图案的石墨烯区域;(ii)硅区域。
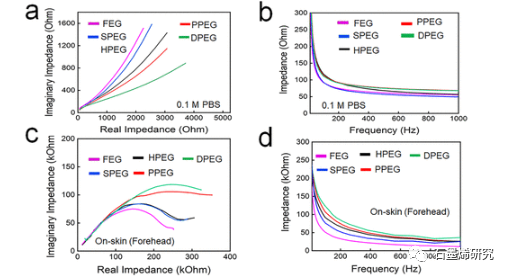
图3. 在一个三电极系统中,使用0.1M的PBS溶液作为电解质,四个微图案的传感器类型和未图案的FEG的(a)Nyquist和(b)Bode图的比较。(c)相同的传感器与额头(无毛皮肤)接触时的Nyquist和(d)Bode图。
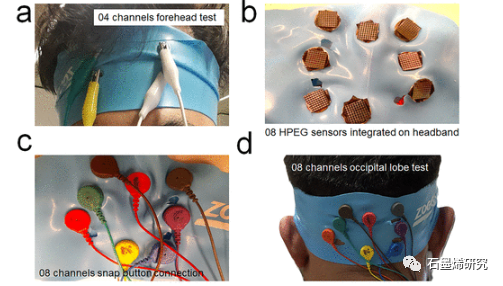
图4. (a) 额头上使用四通道石墨烯传感器的阻抗测量装置的图像。(b) 八通道HPEG传感器在弹性头带上的排列。(c) 传感器背面的卡扣连接图像。(d) 头带上的八通道EG传感器位于有5.0毫米头发的头皮枕部。
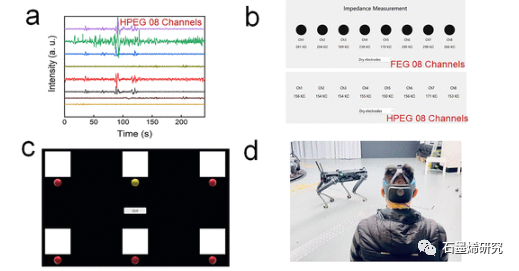
图5. (a) 八通道HPEG传感器从枕部记录的EEG信号。(b) 放在头部枕部的八通道FEG和八通道HPEG传感器系统的阻抗值。(c) 闪烁的视觉标签的图像显示了对个人的八种可能的命令选择。(d) 使用基于HPEG传感器的BMI系统指挥一个四足机器人。
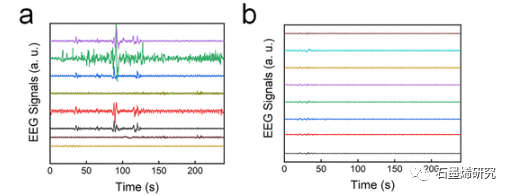
图6:(a)用八通道HPEG传感器采集脑电信号。(b) 八通道湿式传感器系统的脑电信号采集。
相关研究成果由悉尼科技大学Francesca Iacopi 等人2023年发表在ACS Applied Nano Materials (https://doi.org/10.1021/acsanm.2c05546)上。原文:Noninvasive Sensors for Brain–Machine Interfaces Based on Micropatterned Epitaxial Graphene。
本文来自石墨烯研究,本文观点不代表石墨烯网立场,转载请联系原作者。