
成果简介
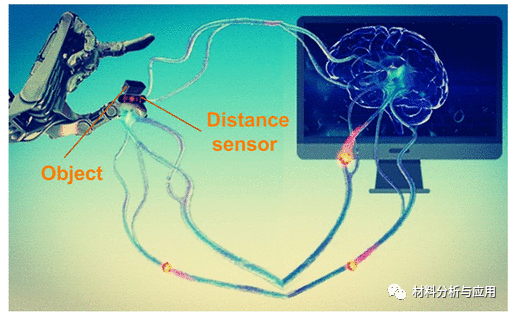

随着智能机器人在仓储运输、人类医疗保健和家庭服务中的广泛应用,无损高效的机器人抓取变得越来越重要。然而,用于反馈抓取行为的电流传感器受到制造成本高、体积和质量大、电路复杂和信号干扰的极大限制。为了解决这些问题,本文,中国科学院理化技术研究所 薛面起研究员在《Langmuir》期刊发表名为“Coaxial Graphene/MXene Microfibers with Interfacial Buffer-Based Lightweight Distance Sensors Assisting Lossless Grasping of Fragile and Deformable Objects”的论文,研究制备了基于还原氧化石墨烯(rGO)/MXene-rGO同轴微纤维的轻量级距离传感器,具有界面缓冲器,以帮助机器人机械手的无损抓取。
所制备的距离微型传感器在 50–300 μm 的距离范围内具有91.2 m–1的高灵敏度,116 ms 的快速响应时间,5 μm 的高分辨率,以及 500次周期的良好稳定性。此外,高性能和轻巧的微型传感器安装在机器人机械手上,通过施加在传感器上的位移来反映抓取状态。通过建立微传感信号与抓取状态的相关性,可以实现对目标的安全、无损、有效的抓取和释放。
图文导读
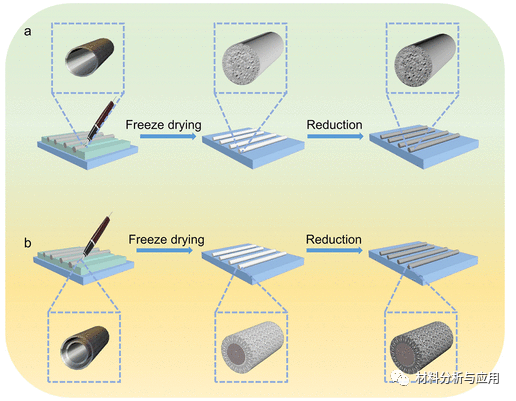
图1.将模板辅助冷直接笔书写技术与冷冻干燥和化学还原相结合,具有rGO和TC分散的单轴(a)和同轴(b)超细纤维阵列的示意图。
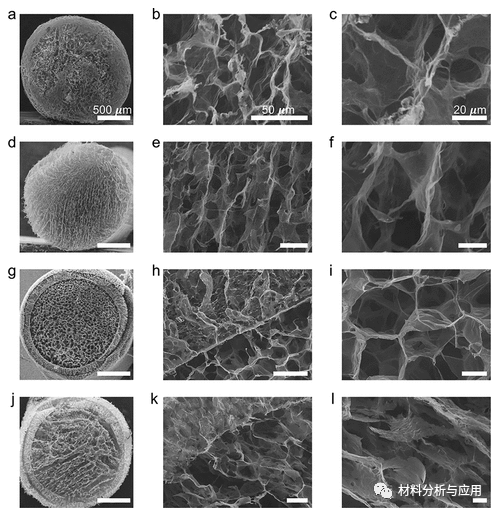
图2.通过SEM分析了4种微纤维的结构
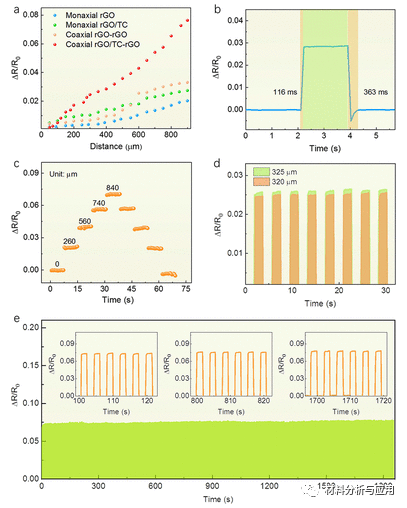
图3.(a) 四个微距离传感器的距离-响应曲线。(b–e)基于同轴rGO/TC-rGO微纤维的微距离传感器的响应时间(b)、不同距离的传感行为(c)、分辨率(d)和稳定性(e)。
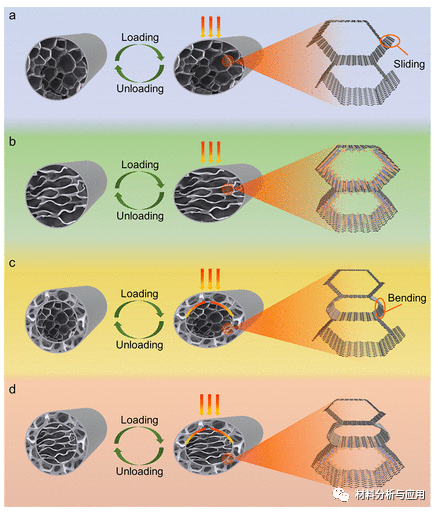
图4.四种微纤维的传感机制示意图
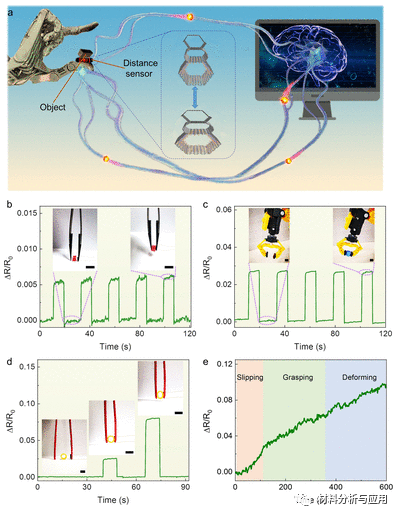
图5.基于rGO/TC-rGO同轴微纤维的距离传感器,有助于成功无损抓取。
小结
综上所述,我们将模板辅助冷直笔书写技术与冷冻干燥相结合,成功制备了轻质同轴异质rGO/TC-rGO超微纤维。独特的非均相核-界面-壳结构和界面缓冲液和TC纳米片的引入赋予rGO/TC-rGO微纤维距离传感器高灵敏度、良好的恢复性、高分辨率和超稳定性。此外,采用高性能距离传感器反馈抓取状态,以确保机器人抓手的非破坏性和有效抓取。基于rGO/TC-rGO超细纤维的距离传感器为调节机械手的抓取状态提供了独特的思路。此外,这种超细纤维的设计原理是整合多种材料和结构设计的优点,为高性能轻量化材料的开发提供了一条路径。
文献:https://doi.org/10.1021/acs.langmuir.3c00374
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。