
成果简介
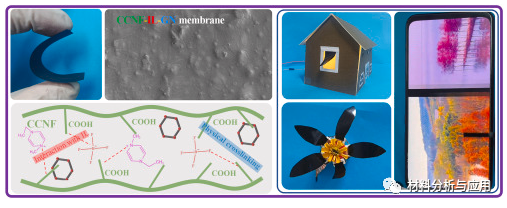

电响应离子软致动器因其在软机器人、仿生机器人、柔性电子产品和可穿戴设备的前景广阔而引起了越来越多的关注。然而,现有的离子致动器仍然需要技术突破,以获得更大的弯曲应变、更快的响应和出色的驱动耐久性。本文,浙江理工大学王帆特聘副教授、李秦川教授等研究人员在《Compos Sci Technol》期刊发表名为“Highly electro-responsive ionic soft actuator based on graphene nanoplatelets-mediated functional carboxylated cellulose nanofibers”的论文, 研究报道了一种基于功能性羧化纤维素纳米纤维(CCNF)掺杂离子液体(IL)和石墨烯纳米片(GN)的高电响应离子致动器。
所提出的CCNF-IL-GN致动器在2.0 V和0.1 Hz下表现出15.71 mm(峰峰值)的大尖端位移,更快的上升时间(2.9s),宽频率带宽(0.1-3.0 Hz),显著降低的相位延迟和长致动耐久性(98.6%保持3小时),而没有致动响应失真,所有这些都是由于设计的离子交联电解质膜的快速易离子迁移和大量的电荷传输能力, 由CCNF纳米纤维与IL和GN的强离子相互作用和交联产生。此外,我们还研究了致动器的仿生应用,如仿生花、仿生手指和仿生窗口。这些结果阐明了所设计的CCNF-IL-GN致动器在仿生机器人、软机器人、可穿戴电子产品和生物医学有源器件方面的巨大潜力。
图文导读
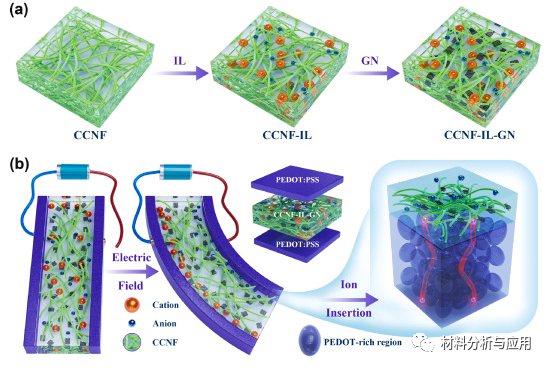
图1.CCNF-IL-GN 离子致动器的制备步骤示意图。
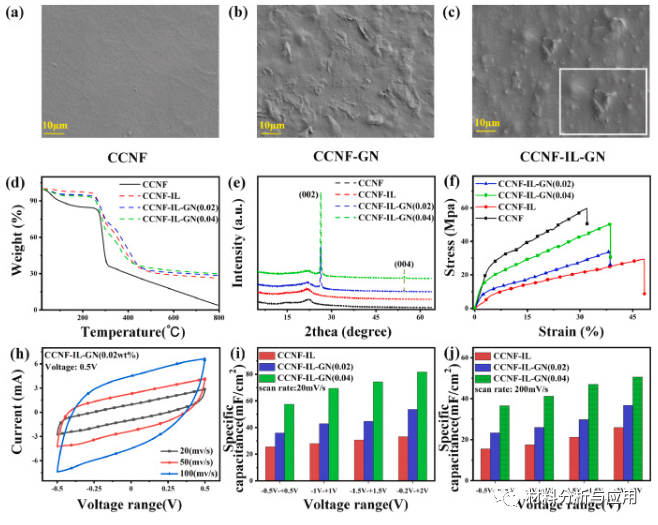
图2、材料表征
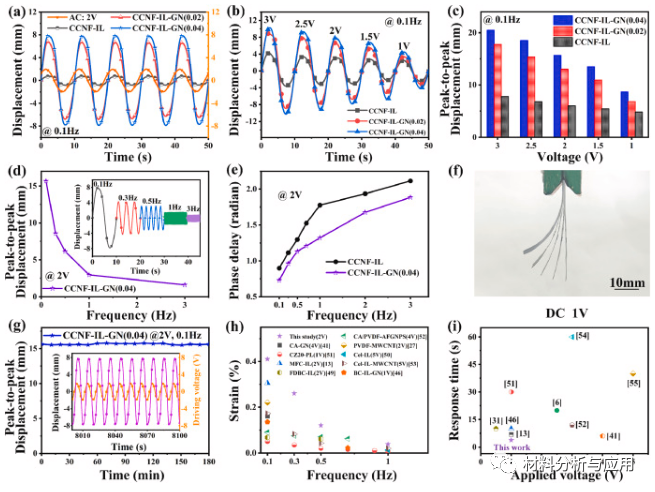
图3.CCNF-IL-GN 执行器的驱动响应。

图4.设计的CCNF-IL-GN离子致动器的仿生应用。
小结
综上所述,利用生物友好型CCNF、IL和GN开发了一种新型高电响应离子软致动器。基于CCNF掺杂IL和GN制备了CCNF的CCNF-IL-GN膜,具有离子传输快、电荷能力优异的特点。研究了致动器的仿生应用,如仿生花、仿生手指和仿生窗口。作者相信,CCNF-IL-GN致动器及其仿生设计将指导仿生机器人、软机器人、柔性触觉电子和生物医学有源器件的进步。
文献:https://doi.org/10.1016/j.compscitech.2022.109845
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。