
人工肌肉Artificial muscles,是下一代机器人不可或缺的组成部分,能够模仿生命系统的复杂运动。然而,人工肌肉的实际应用需要包括应变、应力、能量密度和高机械强度的致动参数的最佳组合。
近日,韩国科学技术院(Korea Advanced Institute of Science and Technology)In Ho Kim,Sang Ouk Kim等,在Nature Nanotechnology上发文,报道了哺乳动物骨骼肌激发的单纤维和束,具有较大而强的收缩驱动。在单轴液晶基质中,使用剥离的石墨烯填料,实现了较大工作容量和快速响应的光热驱动。
此外,电开关原位监测了石墨烯填料的可逆渗流,其主要由介观结构的热力学构象转变引起的。这种动态渗滤行为,有效地增强了致动器纤维的机械性能,特别是在收缩的致动状态下,使哺乳动物肌肉样品,实验了可靠地可逆致动。利用机械柔顺的纤维结构,智能执行器,很容易集成到强大的线束,以及光驱动远程控制的高功率软机器人。

Human-muscle-inspired single fibre actuator with reversible percolation.
可逆渗透的人类肌肉仿生单纤维致动器。
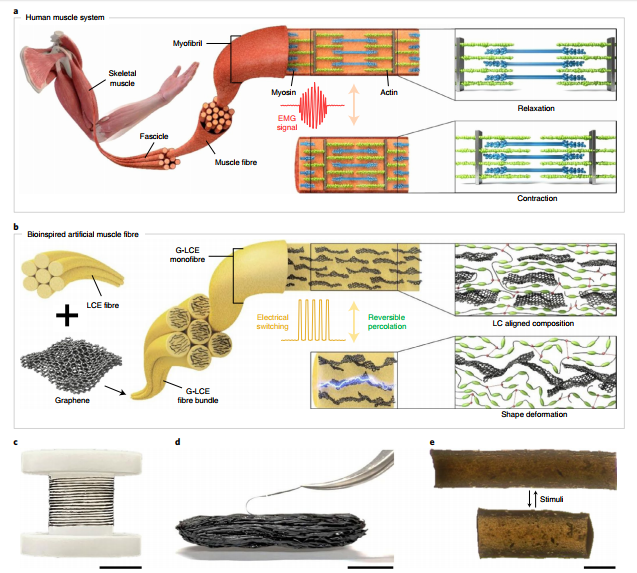
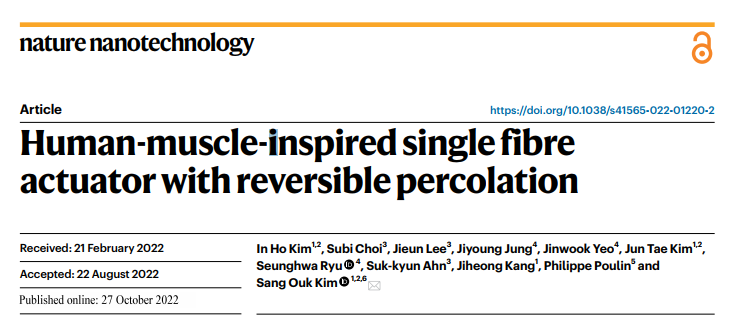
图1:类人肌Human-muscle-like人工肌纤维。
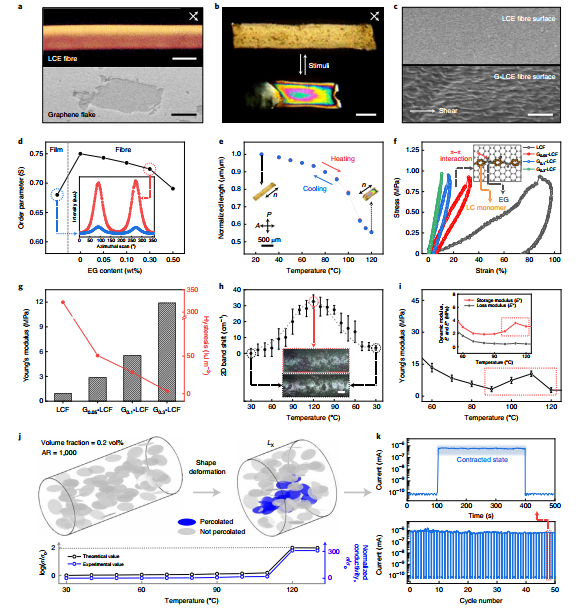
图2:具有可逆电渗透的高度对准的液晶弹性体纤维liquid crystal elastomers fibre LCF和石墨烯液晶弹性体纤维graphene,G-LCF.
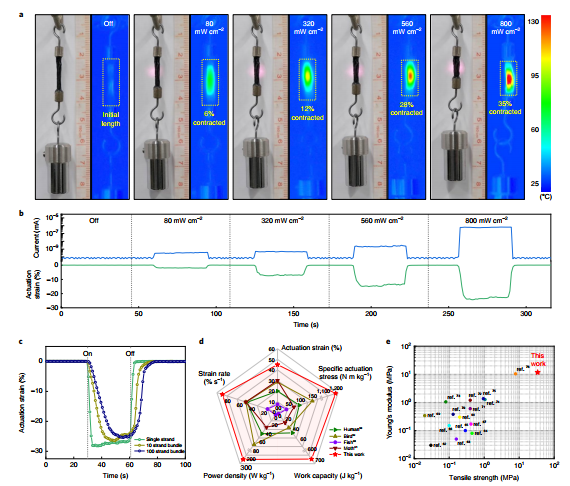
图3:石墨烯液晶弹性体纤维G-LCFs的快速光热驱动。
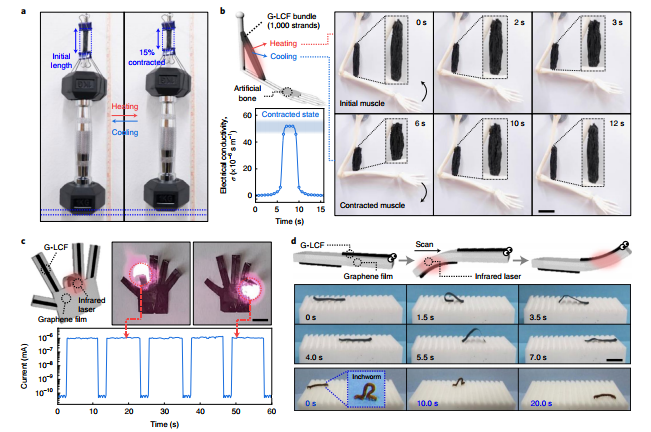
图4:基于人工肌肉的定制执行器演示。
文献链接:https://www.nature.com/articles/s41565-022-01220-2
https://www.nature.com/articles/s41565-022-01220-2.pdf
DOI: https://doi.org/10.1038/s41565-022-01220-2
本文译自Nature。
本文来自今日新材料,本文观点不代表石墨烯网立场,转载请联系原作者。