
成果简介
在过去的几十年中,用于手势识别和人机界面 (HMI) 应用的灵活传感器见证了巨大的进步。目前在手指上或嵌入手套中的传感器无法完全捕捉所有手势,并且常常让佩戴者感到不舒服。本文,电子科技大学张晓升教授团队等在《Advanced Intelligent Systems》期刊发表名为“Ultralight Smart Patch with Reduced Sensing Array Based on Reduced Graphene Oxide for Hand Gesture Recognition”的论文,研究制备了一种掺有聚苯乙烯(PS)球的还原氧化石墨烯(rGO)的薄片-球混合结构,以构建高灵敏度、快速响应和灵活的压阻传感器阵列,该阵列超轻,重量仅为2.8g,并且具有显着的曲面顺应性。具有五感阵列的灵活腕戴式设备用于测量手腕周围的压力分布,以实现准确和舒适的手势识别。智能腕带能够使用机器学习算法对5名参与者的12种手势进行分类,准确率达到 96.33%。为了展示我们的腕带,我们开发了一个实时系统来通过分类结果控制机械手,这进一步展示了这项工作在 HMI 应用中的潜力。
图文导读
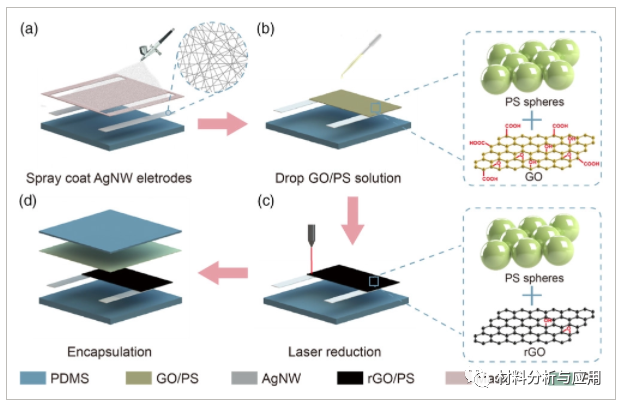
图1、柔性 rGO/PS 压阻传感器的制造过程示意图
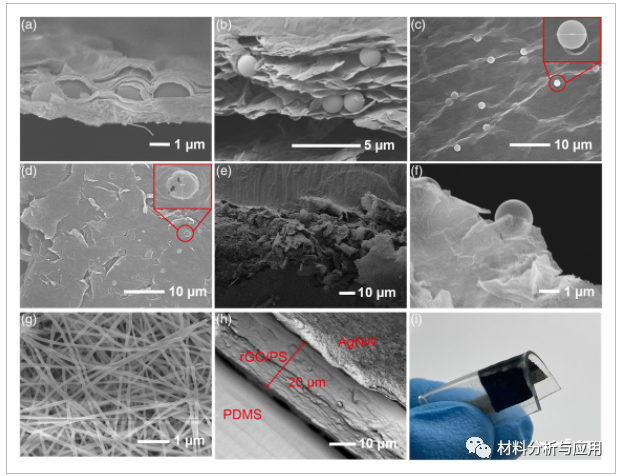
图2、材料表征
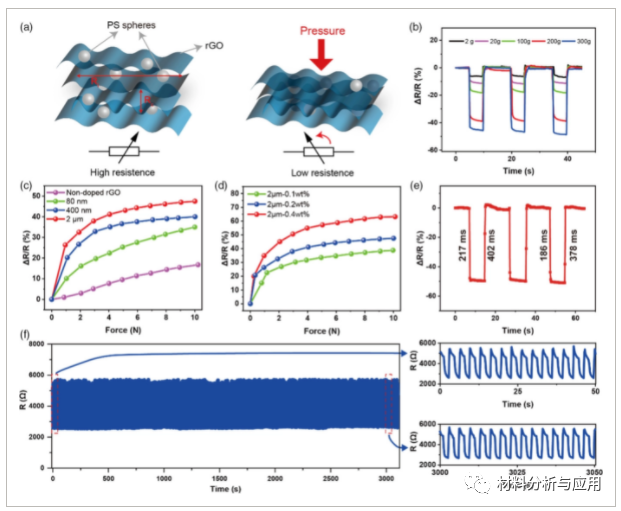
图3、压阻式传感器的传感性能
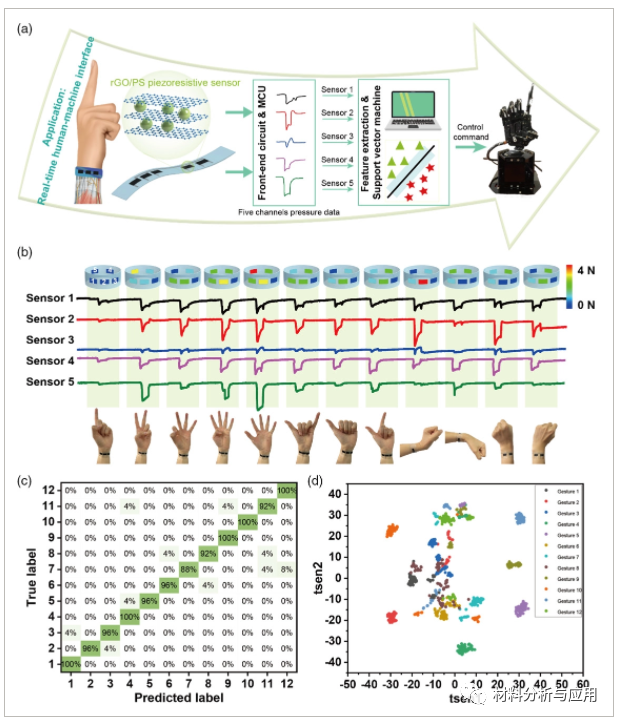
图4、a) HMI 概念验证实时控制示意图。b) 为不同手势生成的信号模式,以及智能腕带上的相应压力图。c) 所有 12 个手势的分类混淆矩阵;准确率为 96.33%。d) 所有 12 个手势的 t-SNE 可视化。
小结
已经展示了一种灵活且高灵敏度的压阻式传感器,以及它在可穿戴手势识别系统中的应用。传感器沉积在rGO和PS球体的混合溶液中,其中球体充当绝缘体以分离rGO碎片,从而在压力下导致更大的接触电阻变化。作者观察到掺杂不同尺寸和重量比的球体会影响器件的传感性能。因此,通过优化我们的设计,当以 0.4 wt% 掺杂 2 μm 球体时,可实现 66% 的最大电阻变化,这比未掺杂的 rGO 传感器高 4 倍以上。
因此,基于 rGO/PS 传感器设计了一种高度灵活的腕带,用于捕捉手腕周围的压力分布。数据处理方法用于截断信号段并提取特征信息。结合SVM分类器,12个手势被成功识别,分类准确率为96.33%。为了进一步支持在 HMI 应用程序中使用我们的腕带设备,我们开发了一个实时系统,允许用户控制机械手。上述结果表明,灵活的rGO/PS压阻式传感器具有出色的特性,可以为下一代可穿戴 HMI 组装智能学习算法。
文献:https://doi.org/10.1002/aisy.202200193

本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。