
成果简介
激光诱导石墨烯(LIG)代表了一种快速、低成本的方法,用于在具有优异电性能的复杂配置中制备可定制的石墨烯基图案。本文,北京理工大学郭晓岗 副教授在《ACS Appl. Mater. Interfaces》期刊发表名为“Stretchable Sensors and Electro-Thermal Actuators with Self-Sensing Capability Using the Laser-Induced Graphene Technology”的论文,研究介绍了在商用聚酰亚胺 (PI) 薄膜上形成的LIG作为可拉伸应变传感器和电驱动致动器的应用。
首先,通过研究工艺参数的影响,系统地揭示了LIG在不同制造条件下的导电性能,并通过实验证明激光的能量密度是评估LIG形成的唯一关键参数,便于选择优化的制造参数。制备具有所需电气性能的 LIG。然后,通过将LIG从PI薄膜转移到聚二甲基硅氧烷上,制备出可以承受超过50%拉伸应变的基于LIG的应变传感器。介绍了实现预先设计的 3D 架构的各种基于 LIG 的电热致动器,以及它们的参数分析。整合万用表系统后,致动器甚至可以通过监测 LIG 的电阻变化来反馈其从 2D 前体到3D架构的转变,从而揭示我们设计作为传感器和致动器的集成能力。最后,展示了带有LIG传感器的可穿戴手套,以展示其远程控制软机器人手的能力。
图文导读
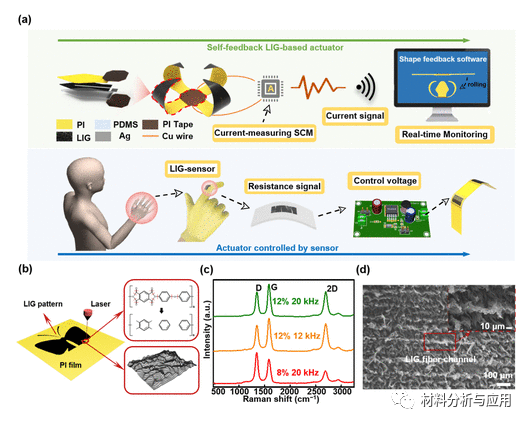

图1. 基于 LIG 的柔性电子器件的工作机理和形貌。(a) 具有自感应能力的基 LIG的致动器的示意图,以及基于 LIG 的执行器的远程控制。(b) 以特定模式制备 LIG 的示意图。(c) LIG 的拉曼光谱。(d) LIG 的 200× 和 1000× SEM 图像。
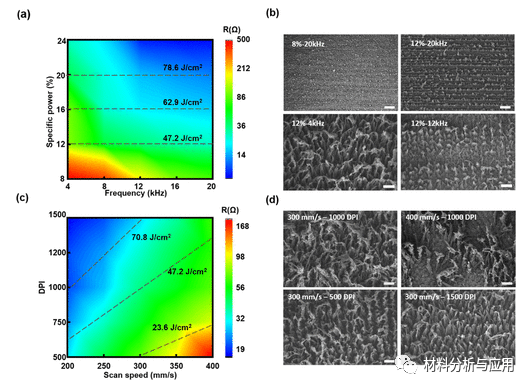
图2. 在 PI 薄膜上制造的 LIG 电阻对激光扫描参数的依赖性
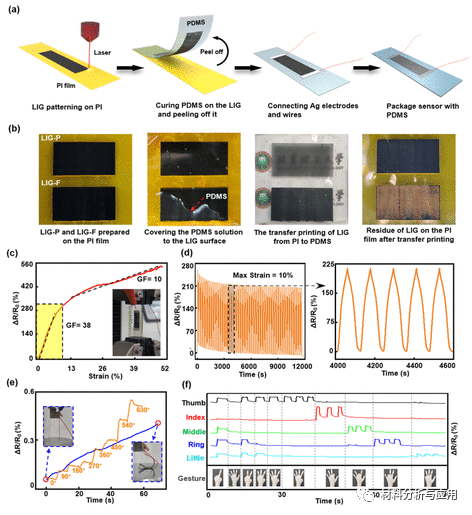
图3. 基于LIG的可拉伸应变传感器的制造和表征
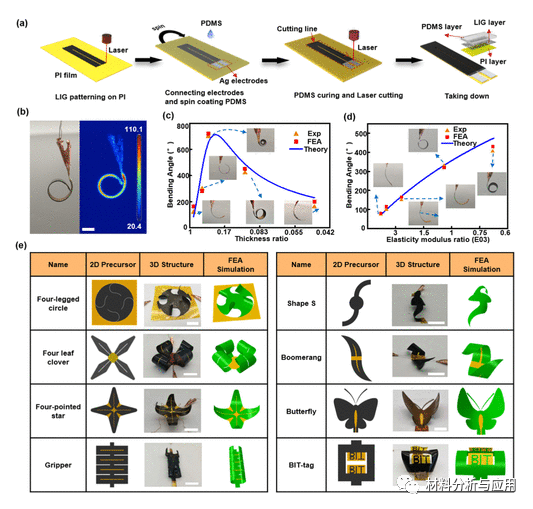
图4. 基于 LIG 的电热致动器的制备和演示
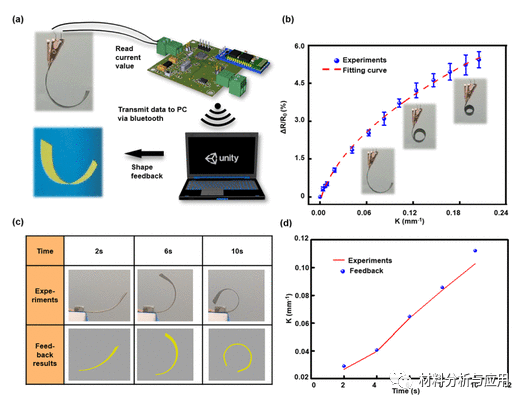
图5. 基于 LIG 的电热致动器的实时反馈
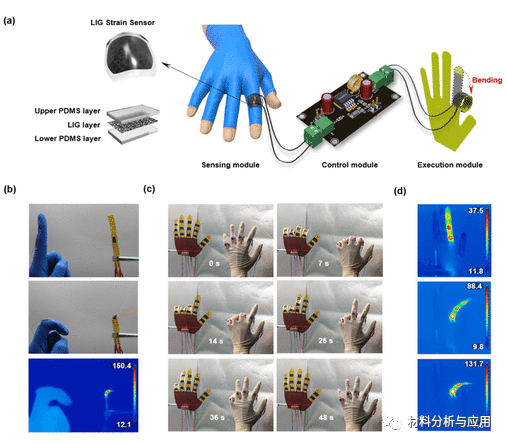
图6. 基于 LIG 传感器和执行器的人机交互系统
小结
综上所述,本文系统地完成了基于LIG的传感器和电热执行器的设计、制造和参数调节,以及它们在软机械手远程控制中的应用。本文提出了两个演示,包括基于 LIG 的自反馈执行器和用于远程控制软机器人的人机交互系统。值得注意的是,实时变形自感知和电热驱动的集成能力展示了基于 LIG 的驱动器作为软机器人和可穿戴电子设备的关键功能部件的优势。
文献:https://doi.org/10.1021/acsami.2c09973
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。