
在生物系统中,软组织可以通过应变增强有效地调节其机械强度以避免损伤。这些组织结合生物体的体感系统,可以经历从触觉到痛觉的可控感觉阈值转变,从而使得生物体能够主动感知到可能造成伤害的机械刺激,并进一步迅速做出反应,防止危险的发生。因此,在应变机械增强之前,主动保护功能的实现依赖于感觉系统触发的强烈且快速的疼痛警告。尽管传统的电子皮肤可以通过预先设定的电阻变化阈值来模拟人类的触觉或痛觉功能,但通过应变感知增强(SPS)来实现主动感知仍然存在一定的挑战。在SPS材料系统中,灵敏度系数(GF)和施加的应变具有典型的正相关性,并在应变阈值前后GF表现出明显的提高,从而实现感知从触觉到痛觉的过渡。更重要的是,探索不依赖于物理尺寸、形状和初始电导率的SPS材料系统将有利于智能友好型软体机器人的发展,对人机交互中危险的提前规避具有重要意义。
近期,中国科学院宁波材料技术与工程研究所智能高分子材料团队陈涛研究员和肖鹏副研究员基于在碳基/高分子复合薄膜的构筑及其柔性驱动与传感方面的研究基础(ACS Nano, 2019, 13, 4368; Nano Energy, 2019, 59, 422; Nature Commun., 2020, 11, 4359; Nano Energy, 2021, 81, 105617; Adv. Funct. Mater., 2021, 31, 2105323; Adv. Funct. Mater. 2022, 32, 2107281; Nano-Micro Lett.,2022, 14, 32; Nano-Micro Lett.,2022, 14, 62 等),受生物软组织应变机械增强的启发,提出了基于SPS效应的仿生皮肤,实现从触觉到痛觉感知的动态转变。
本工作采用界面自组装和原位功能化策略构筑了具有界面互锁结构的二维石墨烯基弹性超薄膜(ECF)。与基于一维碳纳米管的ECF不同,基于二维石墨烯片层的ECF表现出随应变正向变化的GF行为,这和真实脊椎动物的神经感觉系统具有相似的感知趋势。在ECF中,石墨烯片层之间相互堆叠形成的动态网络可以通过不同程度的滑移灵敏地响应外界应变刺激,从而实现低应变下正常的触觉感知和高于应变阈值的痛觉感知。进一步,通过调控石墨烯片层的厚度,可以实现应变阈值在7.2%到95.3%范围内变化。这种优异的性能可调性将大大促进ECFs在基于SPS效应的仿生皮肤中的应用,去模仿人体组织的疼痛感知功能,比如监测肌腱的过度拉伸以及手背皮肤受到拉扯产生的痛觉。受河豚皮肤三维形变启发,将ECF集成为自支撑形式的仿生皮肤,可以灵敏感知接触或非接触式机械刺激以及实时监测三维气动形变。不仅如此,还可以通过SPS效应有效地检测到处于过度膨胀状态的三维形变,实现动态的痛觉感知。未来,基于SPS效应的ECFs有望在安全友好的人机交互、智能假肢和软体机器人中得到广泛应用。
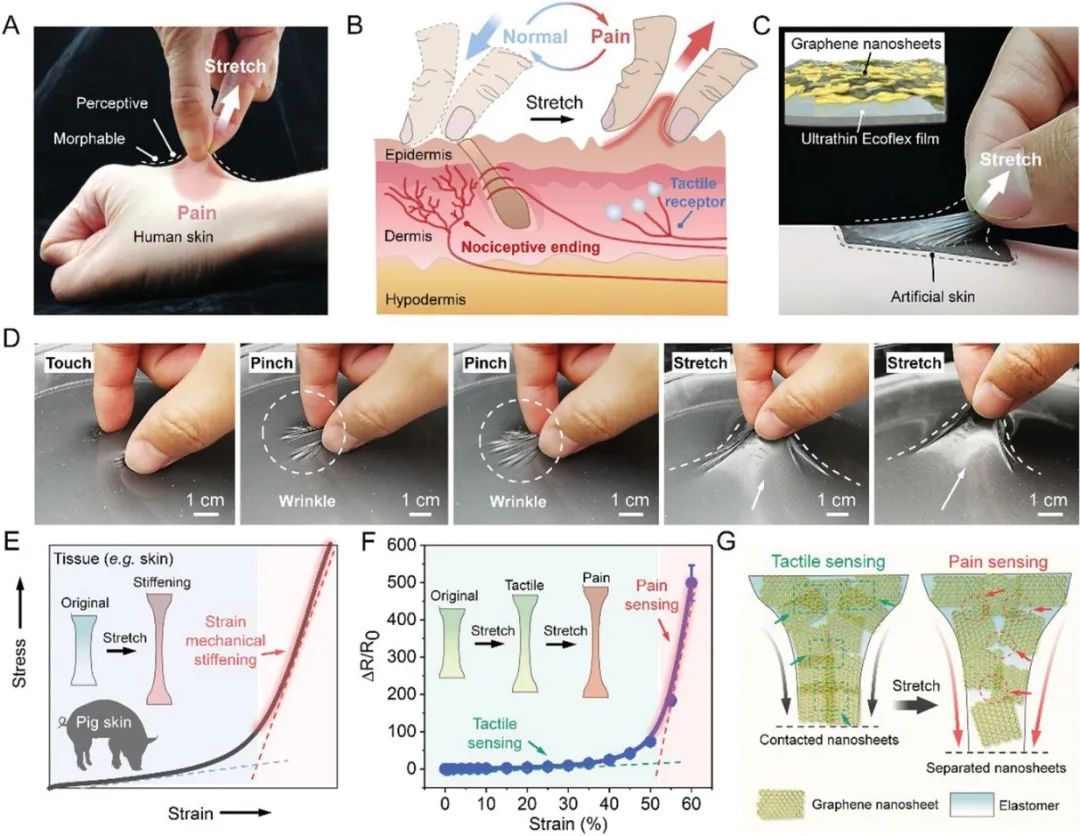
图1 基于ECF的仿生皮肤用于应变感知增强(SPS)的触觉和痛觉管理
相关成果
Adv. Funct. Mater.
Biomimetic Skins Enable Strain-Perception-Strengthening Soft Morphing
DOI: 10.1002/adfm.202201812
文章链接: https://doi.org/10.1002/adfm.202201812
项目支持
国家自然科学基金
52073295
浙江(之江)实验室开放研究项目
No.2022MG0AB01
国家自然科学基金委中德交流项目
M-0424
中科院前沿科学重点研究项目
QYZDB-SSW-SLH036
中国科学院国际合作局
174433KYSB20170061
王宽诚国际交叉团队
GJTD-2019-13
本文来自中科院宁波材料所,本文观点不代表石墨烯网立场,转载请联系原作者。