
科幻电影中令人印象深刻的智能机器人近年来吸引了越来越多的关注,研究人员为提升机器人的感知和操控能力进行了不断的努力,以推动智能机器人能够尽快走进人们的生活中。发展能够灵敏感知复杂外部压力环境的机器人皮肤,对智能机器人的发展至关重要。然而,传统压力传感材料单一的微观结构往往导致它们呈现单一的压敏特性:具有低检测极限的材料难以承较大压力;反之,具有宽检测范围的材料又无法感知轻微的压力刺激。如何设计并可靠地制备兼具极低检测极限和宽检测范围的压力传感材料,是压力传感器和电子皮肤领域的关键课题之一。
苏州大学江林教授课题组针对上述问题,报道了一种3D打印的超薄壁蜂窝结构和厚壁蜂窝结构叠层复合结构的石墨烯压力传感材料,通过利用不同微观结构层压阻特性的显著差异模拟人皮肤中双机械感受器的协同作用,获得了极低检测极限和宽检测范围的统一。
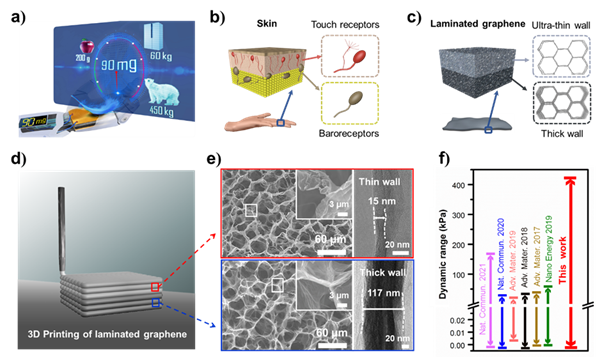

图1. 叠层结构石墨烯的设计、3D打印示意图及其微观结构和压力检测范围。
研究人员发展了一种基于卡波姆水凝胶的新型水基石墨烯墨水,利用水凝胶中分子网络的支撑作用,实现了超低固相含量(3 mg/mL)石墨烯墨水的制备。该水凝胶基石墨烯墨水具有显著的剪切变稀特性、较高的弹性模量的屈服强度,可在满足墨水直写(Direct-Ink-Writing,DIW)3D打印技术对流变学性能需求的前提下,可以在较大范围内调节石墨烯的固相含量,为精准调控打印材料的微观结构铺平了道路。研究人员设计并打印了由超薄壁蜂窝结构和厚壁蜂窝结构叠层复合的石墨烯压力传感材料。其中,柔软的超薄壁蜂窝结构层的低模量,以及厚壁蜂窝结构层的较高模量,使它们具有显著不同的压力-电阻响应性能,可以模拟人皮肤中双机械感受器的协同作用,来获得极低检测极限和宽检测范围的统一。基于该叠层石墨烯的压力传感器件,在实现低至1 Pa的极低检测极限的同时,还具有宽达1 Pa−400 kPa的压力检测范围,并在1 Pa −13 kPa和13 kPa −400 kPa范围内分别获得了3.1 和0.22 kPa−1的高灵敏度。该压力感知范围甚至超过了人类皮肤的压力感受范围。此外,基于该叠层石墨烯集成的柔性传感器件,还能实现对重量的定量检测和显示,并灵敏感知压力的空间分布,这表明其具有制备智能机器皮肤的良好前景。研究人员还利用该材料实现了灵敏的声纹识别、运动和呼吸检测。DIW基3D打印技术的灵活性,以及叠层结构的材料设计理念,为通过将不同微观结构复合来获得具有独特压力感知能力的新材料提供了一种有效途径,可以显著推进智能机器人皮肤、运动与健康检测等器件的研究进程。
论文信息:
Beyond Skin Pressure Sensing: 3D Printed Laminated Graphene Pressure Sensing Material Combines Extremely Low Detection Limits with Wide Detection Range
Kunli Cao#, Miao Wu#, Jiabao Bai, Zhen Wen, Jianwei Zhang, Tianyi Wang, Meiwen Peng, Tao Liu, Zheng Jia, Zhiqiang Liang*, Lin Jiang*
Advanced Functional Materials
DOI: 10.1002/adfm.202202360
原文链接:https://onlinelibrary.wiley.com/doi/abs/10.1002/adfm.202202360
本文来自MaterialsViews China,本文观点不代表石墨烯网立场,转载请联系原作者。