
成果简介

自然生物有机体的系统性、灵活性和复杂性是研究人员源源不断的灵感来源。因此,模仿自然智能系统开发微型机器人引起了广泛的兴趣。然而,开发适用于各种应用场景的多功能设备具有很大的挑战。本文,中国科学院兰州化学物理研究所周峰、于波等研究人员在《ACS Appl. Mater. Interfaces》期刊发表名为“Toward a Multifunctional Light-Driven Biomimetic Mudskipper-Like Robot for Various Application Scenarios”的论文,研究受弹涂鱼启发,开发了一种将多孔硅橡胶(PDMS)和石墨烯氧化物(GO)相结合的类似弹涂鱼的稳定光致动器。
由于致动膜中的光热诱导收缩应力,致动器对近红外 (NIR) 光表现出可逆且集成良好的响应,这促进了在打开和关闭NIR光时产生周期性和快速运动,例如在空气中弯曲,在液体中爬行。此外,通过合理的设备设计和光调制,机械多功能设备可以在液/气界面按照预先设计的路线可控地漂浮和游泳。更有趣的是,执行器可以以极短的响应时间(400 ms)从液体介质跳到空气,最大速度为2ms–1,在近红外光的刺激下高14.3cm。目前的工作在仿生执行器在微型机器人、传感器和运动等各个领域的应用中具有巨大的潜力。
图文导读
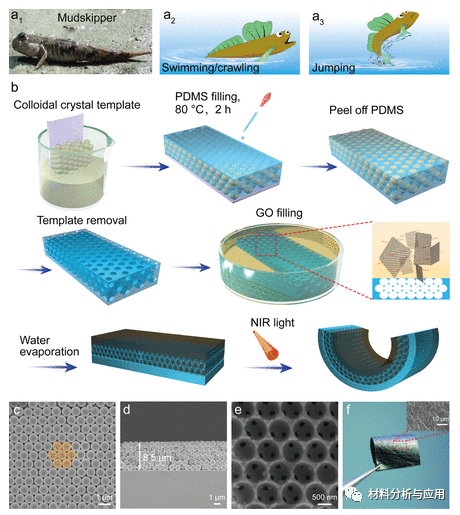
图 1. (a1 ) Mudskipper 的图片,(a2-3 ) 弹涂鱼的游泳/爬行/跳跃行为图,(b) PDMS/GO 致动器的制备过程示意图。(c) 尺寸均匀约为70 nm的PS胶体颗粒SEM图像。(d) 玻璃基板上自组装 PS颗粒的横截面SEM图像。(e) 去除PS模板后多孔PDMS薄膜的SEM图像。(f) 显示PDMS/GO致动器灵活性的光学照片。
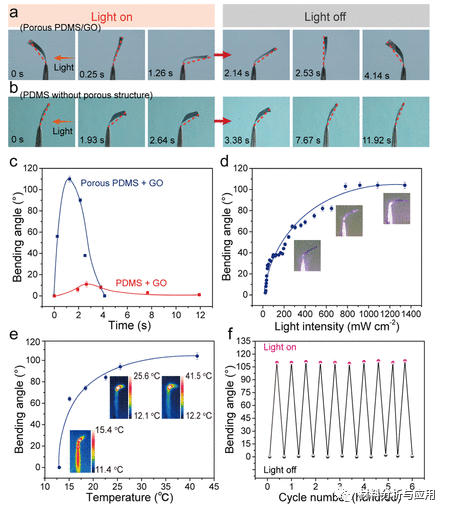
图3. 在NIR (800 mW cm –2 )下,具有 (a) 和不具有 (b) 多孔结构的 PDMS/GO 致动器弯曲运动的时间曲线。(c) 具有(蓝色曲线)和不具有(红色曲线)多孔结构的 PDMS/GO 致动器的弯曲和恢复。当灯打开时,弯曲角度是光强度 (d) 和温度 (e) 的函数。(f) 可逆弯曲试验。每个点代表一个平衡状态,执行器的弯曲和伸直是可逆的,在 600次测试循环后不会降低设备性能。致动器初始状态的弯曲角度称为0度,并添加线条以引导。
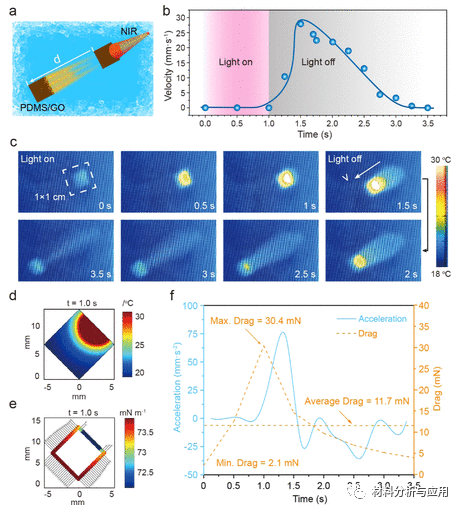
图5.光控 PDMS/GO 浮动装置
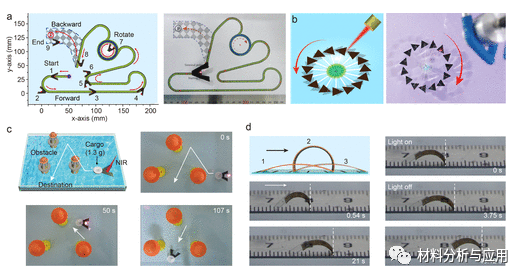
图6. 能够进行自主和光导多模态运动的 PDMS/GO驱动装置的多功能结构设计
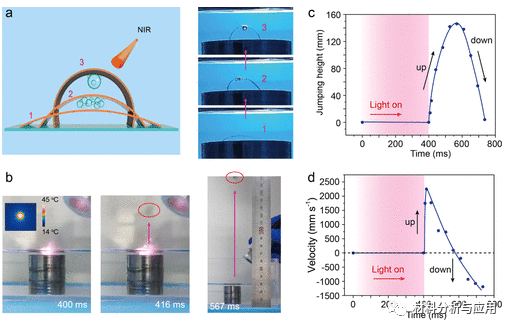
图7. PDMS/GO 薄膜从乙醇溶液到空气的跳跃
小结
总之,本文展示了一种简单且通用的方法来制造模拟弹涂鱼生物功能的 NIR 光驱动致动器。通过简单地复合GO层和PDMS层获得基于多孔PDMS膜的致动器。弯曲行为是温度变化引起的不同内应力值的结果。系统地评估了薄膜厚度和几何形状、光强度和溶剂条件对驱动性能的影响。该设备的简单性允许以良好控制的方式进行受控的多种运动,例如线性运动和旋转,并且驱动是快速、可逆和可重复的。由于用作刺激的光的多功能性,各种游泳和跳跃设备的操作是可行的,由光热效应驱动的PDMS/GO致动器开辟了一条新途径,可以在各种条件下(例如空气、水、乙醇、盐溶液和空气/水界面)将光直接转化为有用的功能。更广泛地说,致动器设计的概念可用于其他光响应材料的简单模块化结合。预计这种简单的设计可用于需要可编程形状变化的不同应用,例如传感器、人造肌肉和软机器人。
文献:https://doi.org/10.1021/acsami.2c03852
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。