
成果简介
近年来,科幻电影中的人工智能机器人越来越受到关注,人们在提高机器人的感知和操纵性能方面也投入了大量的精力。基于此,开发能够处理复杂外部压力环境的机器人皮肤是智能机器人的迫切需求。然而,由于缺乏同时具有极低探测极限和广泛探测范围的压力传感材料,这目前仍然是一个重大的挑战。
本文,苏州大学江林教授和梁志强副教授等研究人员在《Advanced Functional Materials》期刊发表名为“Beyond Skin Pressure Sensing: 3D Printed Laminated Graphene Pressure Sensing Material Combines Extremely Low Detection Limits with Wide Detection Range”的论文,研究受人类皮肤双机械感受器协同策略的启发,通过3D打印、超薄和厚壁多孔微结构组成的层压石墨烯压力传感材料。基于这种层压石墨烯,压阻式压力传感器实现1pa的超低检测限,超宽检测范围(1pa−400kpa),在1Pa−13 kPa和13−400 kPa的压力区,灵敏度分别为3.1和0.22 kPa−1,此外,基于这种层压石墨烯的皮肤可实现压力/重量的定量检测。这种层压石墨烯可以很容易地集成到柔性压力传感阵列中,从而能够映现压力的空间分布,这在如电子皮肤、生理信号监测和人机界面等方面显示出巨大的应用潜力。
图文导读
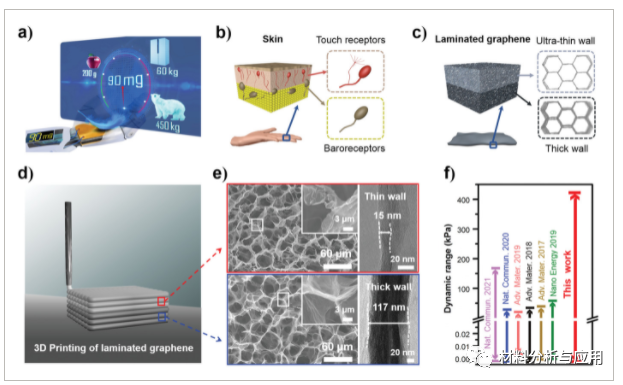

图1、具有不同多孔微结构的3D打印层压石墨烯压力传感材料
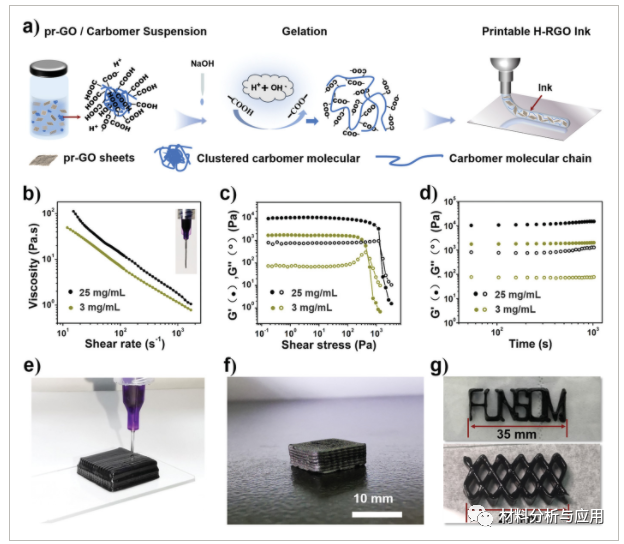
图2、H-RGO墨水的制备和流变特性以及层压石墨烯的3D打印
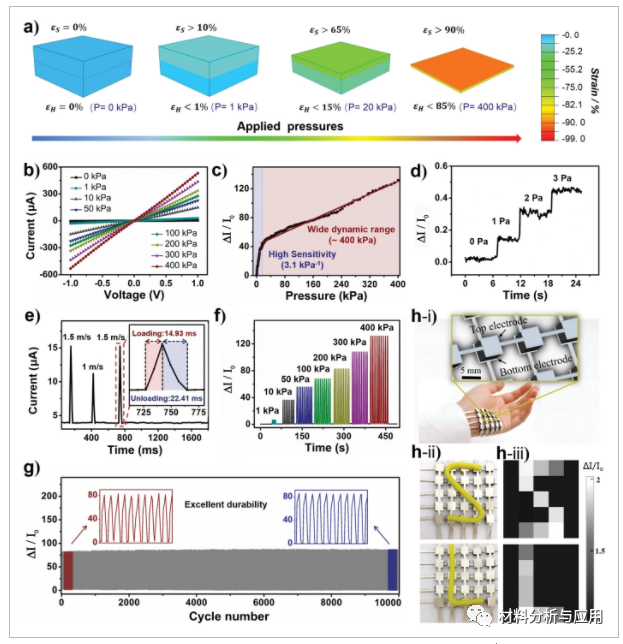
图3、a) 层压石墨烯在施加压力下的应变计算,显示了薄壁(顶部)和厚壁蜂窝层(底部)对不同施加压力的响应。b)压力传感器在不同施加压力下的I – V曲线。c) 压力传感器的压力响应曲线,在低压状态 (<13 kPa) 和 ≈0.22 kPa -1下表现出 ≈3.1 kPa -1的压力灵敏度在高压状态(13-400 kPa)。d) 加载压力为 1、2 和 3 Pa 时传感器的阶跃响应。e) 风载荷下的压力传感器。f)在具有多个加载/卸载循环的宽压力范围(1-400 kPa)内压力传感器的稳定相对电流变化。g) 器件在 200 kPa 压力下经过 10000 次加载/卸载循环的可靠性测试表明器件具有出色的长期稳定性。hi) 放置在手上的柔性 5 × 5 压力传感器阵列的照片和设备结构示意图。h-ii) 压力传感器阵列表面上字母“S”和“L”的照片。h-iii) (h-ii) 中压力分布的当前映射。
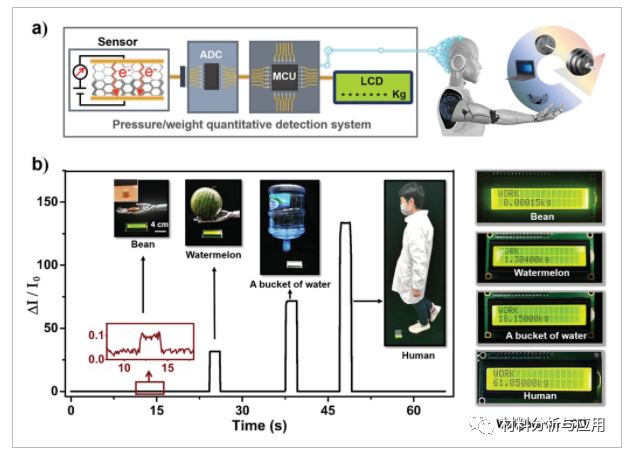
图4、由3D打印层压石墨烯压力传感材料集成的重量定量检测装置
小结
综上所述,设计并印刷了受皮肤启发的层压石墨烯压力传感材料,该材料由具有非常低弹性模量的柔软超薄壁蜂窝层和具有较高弹性模量的相对坚硬的厚壁蜂窝层组成。这种层压石墨烯压敏材料证明了将其集成到柔性大面积电子皮肤中的可行性。基于层压石墨烯制备的机器人皮肤显示了在大范围内定量检测和显示重量/压力的能力。这种以皮肤为灵感的材料结构设计理念结合了灵活便利的3D打印策略,为智能机器人的高性能压力传感设备的开发提供了一条有前途的道路。
文献:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202202360
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。