
成果简介

在智能机器人、智能传感器、仿生设备等领域,实现灵活、精确的机械运动对具有快速、精确可控响应的执行器提出了很高的要求。本文,北京化工大学潘凯研究员与浙江大学朱林利教授等研究人员在《ACS Appl. Mater. Interfaces》期刊发表名为“Graphene-Based Moisture Actuator with Oriented Microstructures Prepared by One-Step Laser Reduction for Accurately Controllable Responsive Direction and Position”的论文,研究报告了一种基于石墨烯的湿度驱动器,通过快速、可控、甚至可编程的一步激光还原方法实现精确可控的方向和位置响应。激光还原诱导的定向微结构有助于精确引导石墨烯基Janus薄膜中水分响应的方向和位置。这些新型水分致动器中优异的水分-机械响应行为源自Janus结构和线扫描层的周期性微观结构。作者定制的复杂智能设备,如鼓、带和三维波湿度驱动器,可以高度匹配和验证有限元模拟,这将激发进一步智能机器人设计的创造,以实现精确变形。
图文导读
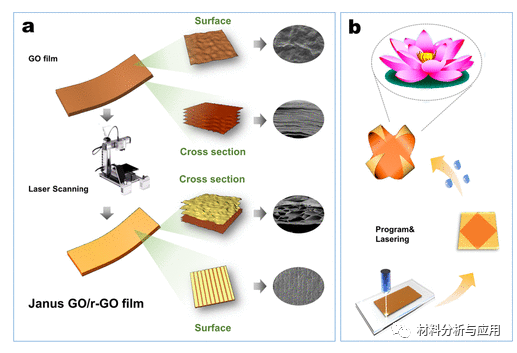
图1. (a) 激光诱导Janus制造石墨烯湿度驱动器过程示意图。(b) 仿生图案设计。
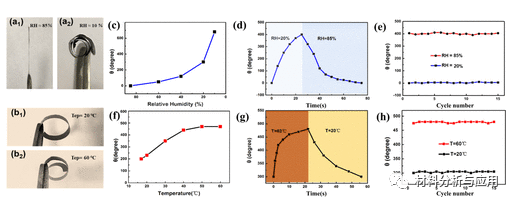
图2. (a) 变形石墨烯- RH=85和10%时的Janus薄膜;(b) 变形石墨烯-基于Janus薄膜,温度为20和60 °C;(c) 水分响应石墨烯- 基于Janus薄膜 (rGO-1);(d) RH = 20 和 85% 之间可逆弯曲运动的时间相关曲线;(e) 反复试验水分反应;(f) 的热响应石墨烯- 不同激光速度的基于 Janus 薄膜;(g) 20 至 60 °C 之间可逆弯曲运动的时间相关曲线;(h) 热响应的重复实验。
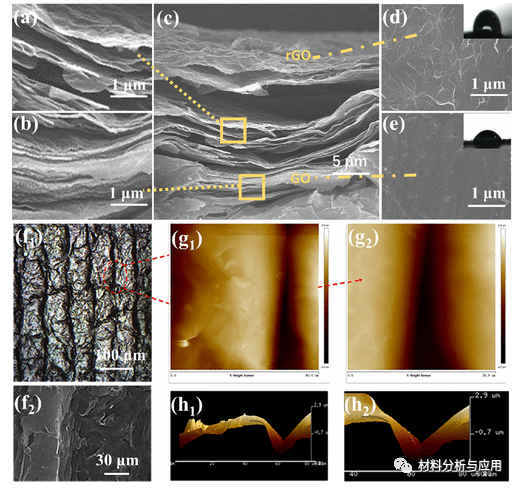
图3、表征图示
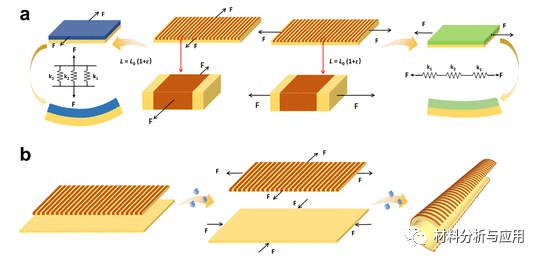
图4. 机械等效分析模拟图示
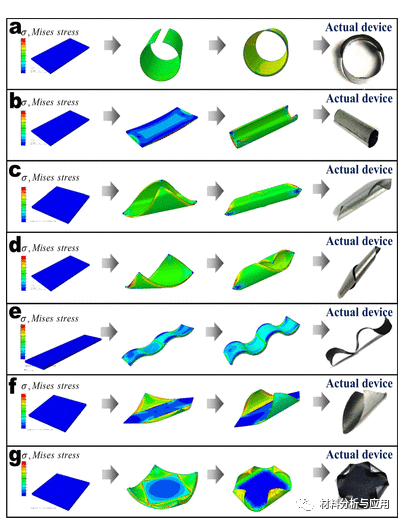
图5. 设计、机械仿真和应用石墨烯- 基于 Janus 薄膜响应可控位置和方向:(a)rGO 0°,(b)rGO 90°,(c)rGO 45°,(d)rGO 60°,(e)三维波,(f ) 两角定位;(g) 四角定位。
小结
综上所述,我们利用一步激光还原法成功地制备了一种石墨烯基水分致动器,具有精确可控的响应方向和响应位置。本文定制的复杂智能设备,如鼓、带和三维波湿度驱动器,可以与有限元模拟高度一致,有望在智能机器人、智能传感器、仿生设备和其他需要高机械精度的前沿领域广泛应用。
文献:https://doi.org/10.1021/acsami.2c00873
本文来自材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。