
成果简介
智能致动器由于其驱动方式多样、形变类型多样、应用广泛等特点,已成为近年来智能材料的研究热点。然而,只能由单一刺激驱动的传统双层致动器的应用领域受到极大限制。因此,有必要开发多响应执行器以拓宽执行器的应用领域。本文,本文,福建船政交通职业学院 Kaihuai Yang和福建工程学院Mingcen Weng等研究人员在《J APPL POLYM SCI》期刊发表名为“Dual-responsive and bidirectional bending actuators based on a graphene oxide composite for bionic soft robotics”的论文,研究基于氧化石墨烯 (GO) 和聚对苯二甲酸乙二醇酯 (PET) 复合材料的双响应和双向弯曲致动器。由GO薄膜真空过滤和PET薄膜热压制成。由于湿膨胀效应,GO/PET 致动器可由湿气驱动。受益于光热转换的能力以及GO和PET之间热膨胀系数的差异,GO/PET致动器可以由光驱动。此外,还提出了基于执行器的三种演示模型(包括仿生花、智能抓手和仿生蠕虫机器人),以验证致动器在实际应用中的潜力。这些演示模型表明,执行器在智能机器人领域具有巨大的应用潜力。
图文导读
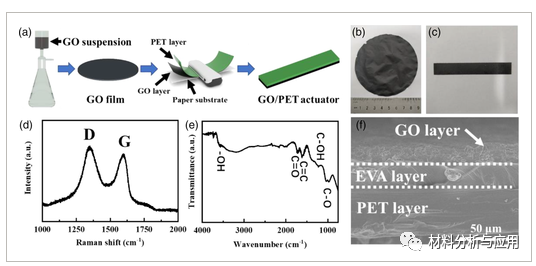

图1、GO/PET 致动器的制造和表征。
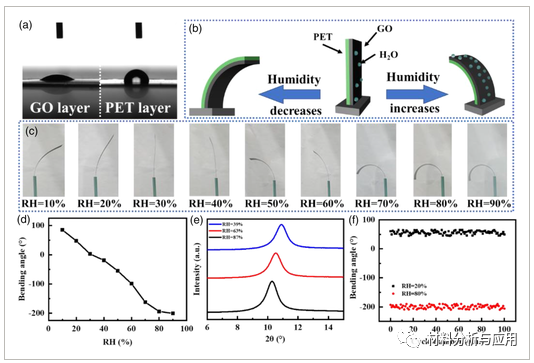
图2、GO/PET致动器的湿度驱动性能
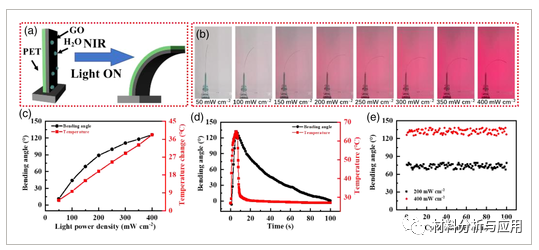
图3、GO/PET致动器的近红外 (NIR) 光驱动性能。
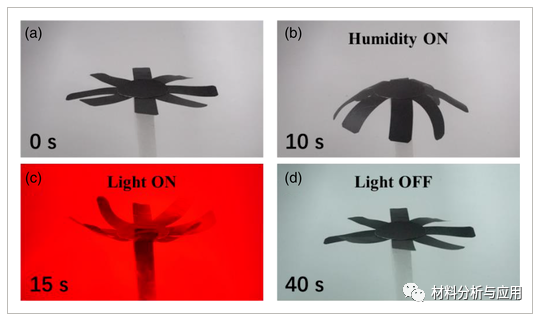
图4、基于 GO/PET 执行器的仿生花。
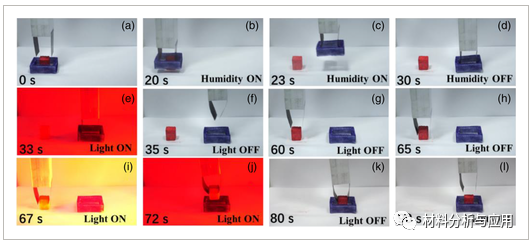
图5、基于 GO/PET执行器的智能抓手。
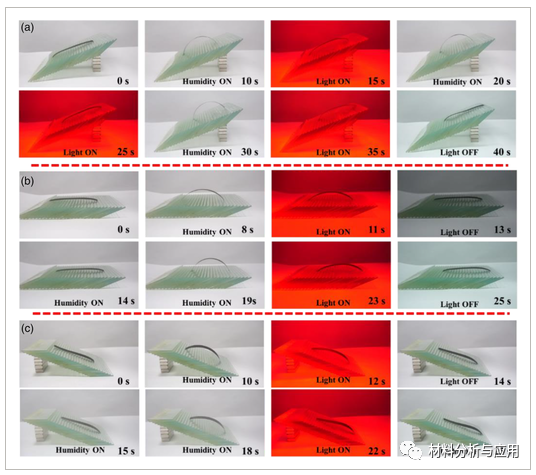
图6、基于GO/PET执行器的仿生蠕虫机器人
小结
总之,通过GO薄膜的真空过滤和PET薄膜的热压制备了具有双响应特性的双层驱动器。为了验证执行器在实际应用中的潜力,提出了三种基于执行器的演示模型。第一个模型是仿生花。通过交替加湿和近红外光照射,可以表现出双向弯曲变形,模仿自然花朵的开合运动。其次,为了充分利用执行器的双向弯曲变形,提出了一种智能夹具。所提出的智能抓手可以提供两种抓取方式,包括从物体内部提起(加湿)和从物体外部抓取(光照射),可以适应实际应用。最后设计了仿生蠕虫机器人,它可以通过控制近红外辐射和加湿的刺激来上下楼。
文献:https://doi.org/10.1002/app.52014
本文来自 材料分析与应用,本文观点不代表石墨烯网立场,转载请联系原作者。