
近年来,柔性可穿戴设备在生物集成系统、无创健康监测和软机器人技术领域引起了越来越多的关注。为了能将其长时间舒适地佩戴在皮肤上,并使其在各种剧烈的机械变形下提供稳定的电性能,这就要求柔性电子设备必须具有良好的稳定性、生物相容性、优异的柔韧性和可拉伸性,能够粘附在弯曲的皮肤表面并随其变形。然而,剧烈的机械变形将不可避免地导致器件电子性能的退化甚至失效。
暨南大学麦文杰研究员、北京纳米能源与系统研究所潘曹峰研究员、宁波材料所陈涛研究员、澳大利亚莫纳什大学Gao Wenchao 等人报道了一种基于可图案化和可拉伸的超薄褶皱石墨烯复合材料的应变不敏感自供电触觉传感器阵列。结合光刻和阴影掩模技术,石墨烯可以按照设计在基板上精确地形成图案,实现制造复杂的可拉伸器件,并且可通过调节石墨烯的皱纹结构来优化其拉伸性能。作者以此构建了一个可拉伸的压力传感器阵列,即使拉伸到100%应变,其信号输出也不会出现衰减。研究表明,其独特的共形皱纹结构是器件应变不敏感特性的关键因素。这项工作为设计基于石墨烯的新型应变不敏感可拉伸柔性电子器件提供了新的途径。该研究以题为“Strain-Insensitive Self-Powered Tactile Sensor Arrays Based on Intrinsically Stretchable and Patternable Ultrathin Conformal Wrinkled Graphene-Elastomer Composite”的论文发表在《Advanced Functional Materials》上。

【可拉伸褶皱石墨烯复合材料的制备及性能】
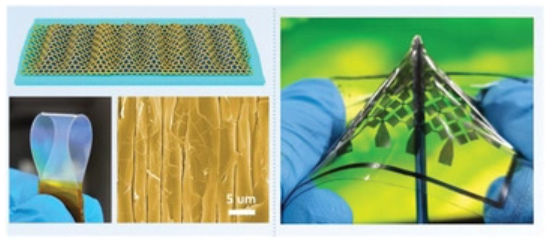
作者报道了一种弹性聚合物诱导的共形褶皱石墨烯,其拉伸性能可通过改变皱纹结构进行调节。该超薄的石墨烯薄膜是由无缺陷的石墨烯纳米片在空气-水界面上自组装,然后转移到Ar等离子体处理并预拉伸的聚二甲基硅氧烷基材上。在应变消除后,由于等离子体处理导致内层和表面之间的不匹配变形,弹性基材上会产生皱纹。结合光刻和阴影掩模技术,作者开发了一种新的制造工艺,无需高温、退火、蚀刻或有机溶剂,即可在弹性体聚合物基板上直接形成晶圆级可拉伸的石墨烯薄膜。最后基于这种复合材料,作者制备了一种半透明的高度可拉伸的单电极摩擦纳米发电机(TENG),其可以拉伸到100%应变而不会出现明显的功率输出衰减。
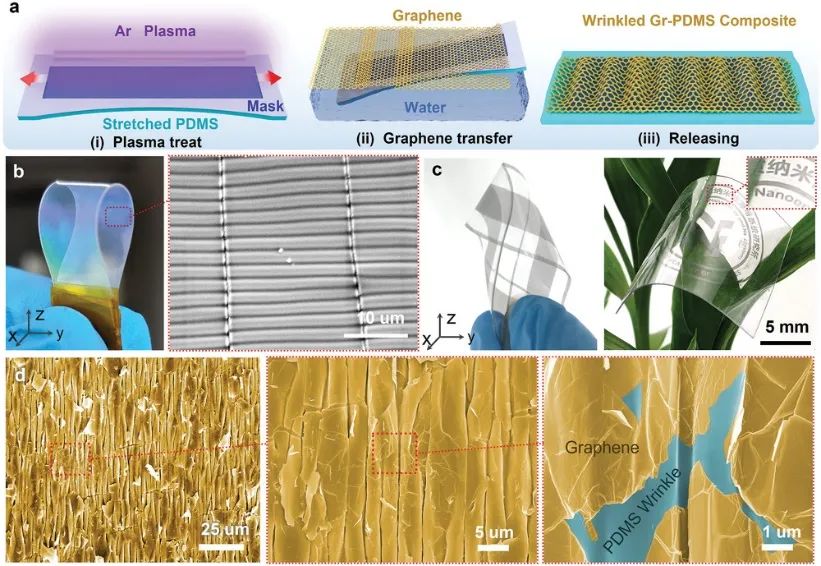
图1可拉伸褶皱石墨烯复合材料的制备
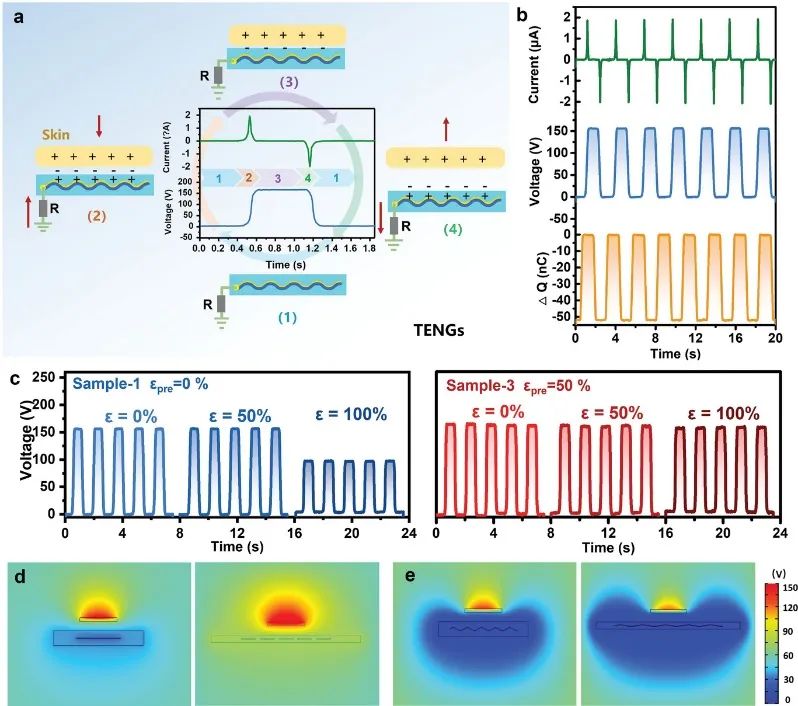
图2基于石墨烯复合材料的TENG
【自供电触觉传感器阵列的设计与应用】
由于优异的拉伸性和导电性,基于褶皱石墨烯复合材料的传感器阵列可以附着在人体皮肤上并捕获图形接触信号,并且可以随人体皮肤变形而不会降低性能。然后,作者设计了一个基于该传感器阵列的人机交互系统。该系统由基于褶皱石墨烯复合材料的传感器阵列、信号采集和远程发射器电路以及计算机组成。传感器阵列可以捕获手指接触的实时摩擦电子信号,随后该电子信号通过相应的传感器位置转换为手指接触区域的位置。最后,作者对不同位置的单个传感器的响应和多个传感器的响应排列进行编程以控制计算机。作者展示了该系统识别出触摸手势并向计算机发送复杂的机器指令以打开 PowerPoint 并在屏幕上打印“Hello World”(图3e)。
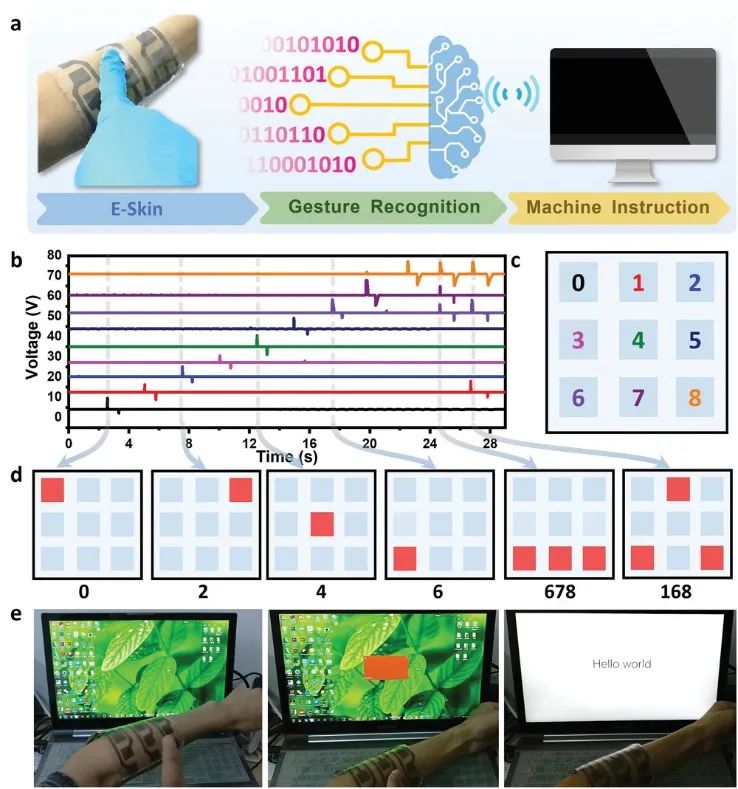
图3自供电触觉传感器阵列的设计
【基于自供电传感器阵列的柔性电子皮肤】
柔性触觉传感器在实时健康监测、机器人、仿生手等各个领域都呈现出巨大的应用潜力。然而,传感器中不可避免的较大的应力和应变容易导致信号失真。因此,需要能够在弯曲和动态表面上稳定运行的新材料和器件。基于褶皱石墨烯复合材料的传感器阵列在0%和50%的应变下展现出相似的响应行为,表明其在对拉伸不敏感的压力传感器件中具有良好的应用潜力。于是作者将其应用于模仿人类皮肤的触觉。为了测试设备的压力强度和分布感应能力,作者将两个手指以不同的压力按压在传感器阵列上。经过数据分析和可视化,结果表明该设备能准确地检测到手指的位置及其压力,在柔性电子皮肤领域展现出了良好的应用潜力。
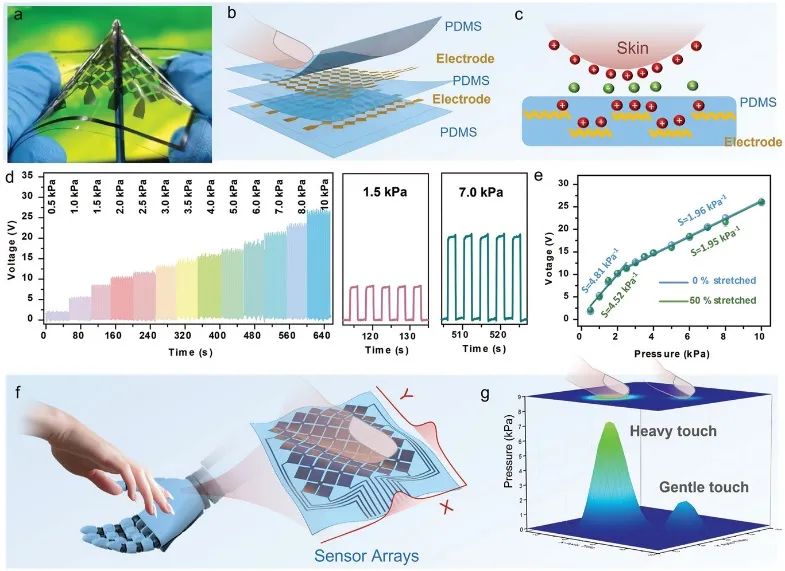
图4用于电子皮肤的自供电传感器阵列
总结:作者报道了一种可图案化和可拉伸的超薄褶皱石墨烯复合材料。结合光刻和阴影掩模技术,石墨烯可以按照设计在基板上精确地形成图案,因此可以制造复杂的可拉伸器件。作者以此制造了一种高度可拉伸的自供电触觉传感器阵列,它可以感知施加压力的分布和强度,且性能不受大应变的干扰。这项工作为构建各种新型石墨烯或其他二维材料应变不敏感的可拉伸和可穿戴传感器阵列提供了新的机会。
本文来自高分子科学前沿,本文观点不代表石墨烯网立场,转载请联系原作者。