
软体机器人可以与生物或易碎物体安全地互动,减小了机器人与人类之间的差距。由于拥有结构可变形性和多样化的响应材料,软体机器人能够在各种外部刺激下实现复杂的变形行为。
然而,目前的软体机器人技术主要依赖于嵌入在弹性橡胶中的气动网络,因此大多数软体机器人都需要与外部电源和控制系统相连。开发能够将热能、光、化学等外部能量转换为机械能,实现可控变形驱动的软智能材料,对无约束软机器人的发展具有重要意义。
有鉴于此,中国科学院宁波材料技术与工程研究所的Tao Chen和Peng Xiao,以及香港理工大学的Haimin Yao等人利用在拉伸和压缩下叠层石墨烯(SGA)会表现出不对称弹塑性成功解决了这一挑战。该研究成果不仅展示了一种制造无约束软机器人、人工肌肉和可重构器件的可行策略,而且为制造基于二维材料的智能材料和结构提供了一种新理念。
本文亮点:
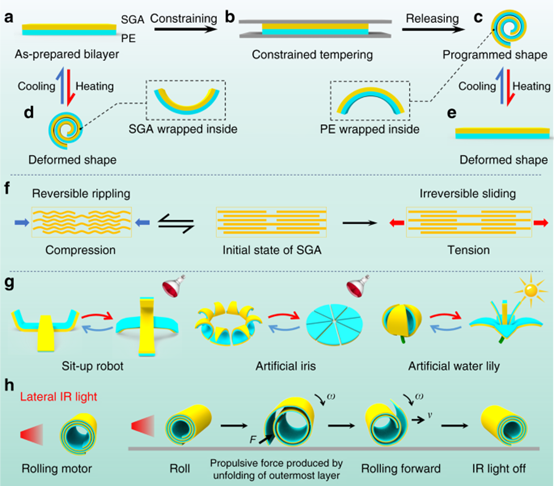
1)将SGA转移到聚乙烯(PE)薄膜上,得到SGA/PE双层膜。该双层膜随着环境温度的变化表现出快速的变形行为。通过结合局部退火处理等技术,可以实现对这种热诱导变形薄膜的程序化构建,从而形成具有复杂三维结构的各种系统。
2)与普通的双层驱动器不同,本研究中的SGA/PE双层膜在特定空间经过退火后,会自发卷曲成卷状,在红外灯照射下可以实现滚动运动,产生无约束的光驱动电机。由于SGA具有不对称弹塑性的特性,使得SGA基材料在开发无约束柔性机器人方面具有很大的应用前景。

Wang, S., Gao, Y., Wei, A. et al. Asymmetric elastoplasticity of stacked graphene assembly actualizes programmable untethered soft robotics. Nat Commun 11, 4359 (2020).
DOI: 10.1038/s41467-020-18214-0
https://doi.org/10.1038/s41467-020-18214-0
本文来自纳米人,本文观点不代表石墨烯网立场,转载请联系原作者。